Робот — Robot



Робот является машина -особенно один программируемый с помощью компьютера — способен выполнять сложную серию действий автоматически. Роботами можно управлять с помощью внешнего устройства управления, или управление может быть встроено в него. Роботы могут быть сконструированы по образцу человека, но большинство роботов — это машины, предназначенные для выполнения определенных задач безотносительно к их эстетике.
Роботы могут быть автономными или полуавтономная и варьируются от гуманоидов , таких как Honda «s Advanced Step в Innovative Mobility ( ASIMO ) и TOSY » ы TOSY пинг — понг Игра Робот ( TOPIO ) для промышленных роботов , медицинские операционные роботы , пациент помощь роботов, собаки терапевтические роботы, коллективно программируемые роевые роботы , беспилотные летательные аппараты, такие как General Atomics MQ-1 Predator , и даже микроскопические нанороботы . Имитируя реалистичный внешний вид или автоматизируя движения, робот может передать чувство интеллекта или собственную мысль . Ожидается, что в ближайшее десятилетие количество автономных устройств будет распространяться, а домашняя робототехника и автономный автомобиль станут одними из основных движущих сил.
Отрасль технологии, которая занимается проектированием, конструированием, эксплуатацией и применением роботов, а также компьютерных систем для их управления, сенсорной обратной связи и обработки информации, — это робототехника . Эти технологии имеют дело с автоматизированными машинами, которые могут заменять людей в опасных средах или производственных процессах или напоминать людей по внешнему виду, поведению или познанию. Многие из сегодняшних роботов вдохновлены природой, внося свой вклад в область био-робототехники . Эти роботы также создали новую отрасль робототехники: мягкую робототехнику .
Со времен древней цивилизации существовало множество описаний настраиваемых пользователем автоматических устройств и даже автоматов, похожих на животных и людей, предназначенных в первую очередь для развлечения. По мере развития механических технологий в индустриальную эпоху появилось больше практических приложений, таких как автоматизированные машины, дистанционное управление и беспроводное дистанционное управление .
Термин происходит от славянского корня робот- , значение которого связано с трудом. Слово «робот» впервые был использован для обозначения вымышленный гуманоида в 1920 чешский язык игры рублей (Rossumovi Univerzální Roboti — Россум Универсальный роботов) на Карела Чапека , хотя это был брат Карел в Йозеф Чапек , который был истинным изобретателем слова. Электроника превратилась в движущую силу развития с появлением первых электронных автономных роботов, созданных Уильямом Греем Уолтером в Бристоле , Англия в 1948 году, а также станков с числовым программным управлением (ЧПУ) в конце 1940-х годов Джоном Т. Парсонсом и Фрэнк Л. Стулен . Первый коммерческий цифровой и программируемый робот был построен Джорджем Деволом в 1954 году и получил название Unimate . Он был продан General Motors в 1961 году, где использовался для подъема кусков горячего металла из машин для литья под давлением на заводе Inland Fisher Guide в районе Западного Трентона города Юинг, штат Нью-Джерси .
Роботы заменили людей в выполнении повторяющихся и опасных задач, которые люди предпочитают не выполнять или не могут выполнять из-за ограничений по размеру, или которые выполняются в экстремальных условиях, таких как космическое пространство или дно моря. Есть опасения по поводу все более широкого использования роботов и их роли в обществе. Роботов обвиняют в росте технологической безработицы, поскольку они заменяют рабочих во все большем количестве функций. Использование роботов в боевых действиях вызывает этические проблемы. Возможности автономии роботов и возможные последствия рассматривались в художественной литературе и могут стать реальной проблемой в будущем.
Содержание
- 1 Резюме
- 2 История
- 2.1 Раннее начало
- 2.2 Системы с дистанционным управлением
- 2.3 Происхождение термина «робот»
- 2.4 Ранние роботы
- 2.5 Современные автономные роботы
- 3 Будущее развитие и тенденции
- 3.1 Новые функции и прототипы
- 4 этимология
- 5 Современные роботы
- 5.1 Мобильный робот
- 5.2 Промышленные роботы (манипуляторы)
- 5.3 Сервисный робот
- 5.4 Обучающие (интерактивные) роботы
- 5.5 Модульный робот
- 5.6 Совместные роботы
- 6 Роботы в обществе
- 6.1 Автономия и этические вопросы
- 6.2 Военные роботы
- 6.3 Связь с безработицей
- 7 современных применений
- 7.1 Автономные роботы общего назначения
- 7.2 Заводские роботы
- 7.2.1 Производство автомобилей
- 7.2.2 Упаковка
- 7.2.3 Электроника
- 7.2.4 Автоматизированные управляемые машины (AGV)
- 7.2.4.1 Ранние роботы в стиле AGV
- 7.2.4.2 Временные технологии AGV
- 7.2.4.3 Интеллектуальные AGV (i-AGV)
- 7.3 Грязные, опасные, скучные или недоступные задачи
- 7.3.1 Космические зонды
- 7.3.2 Телероботы
- 7.3.3 Автоматизированные машины для сбора урожая фруктов
- 7.3.4 Домашние роботы
- 7.4 Военные роботы
- 7.5 Горные роботы
- 7.6 Здравоохранение
- 7.6.1 Домашняя автоматизация для пожилых людей и инвалидов
- 7.6.2 Аптеки
- 7.7 Исследовательские роботы
- 7.7.1 Бионические и биомиметические роботы
- 7.7.2 Нанороботы
- 7.7.3 Реконфигурируемые роботы
- 7.7.4 Операторы роботизированных мобильных лабораторий
- 7.7.5 Роботы с мягким телом
- 7.7.6 Рой роботов
- 7.7.7 Роботы с тактильным интерфейсом
- 7.8 Современное искусство и скульптура
- 8 роботов в популярной культуре
- 8.1 Литература
- 8.2 Фильмы
- 8.3 Секс-роботы
- 8.4 Проблемы, изображенные в массовой культуре
- 9 См. Также
- 9.1 Конкретные концепции робототехники
- 9.2 Методы и категории робототехники
- 9.3 Конкретные роботы и устройства
- 9.4 Другие статьи по теме
- 10 Ссылки
- 11 Дальнейшее чтение
- 12 Внешние ссылки
Резюме


Слово робот может относиться как к физическим роботам, так и к виртуальным программным агентам , но последние обычно называются ботами . Нет единого мнения о том, какие машины можно отнести к роботам, но среди экспертов и общественности существует общее мнение, что роботы, как правило, обладают некоторыми или всеми из следующих способностей и функций: принимать электронные программы, обрабатывать данные или физическое восприятие в электронном виде, работать автономно до некоторой степени перемещаться, управлять своими физическими частями или физическими процессами, ощущать и манипулировать окружающей средой, а также проявлять разумное поведение, особенно поведение, которое имитирует людей или других животных. С концепцией робота тесно связана область синтетической биологии , изучающая сущности, природа которых больше сравнима с существами, чем с машинами.
История
Идея автоматов зародилась в мифологиях многих культур по всему миру. Инженеры и изобретатели из древних цивилизаций, включая Древний Китай , Древнюю Грецию и Птолемеевский Египет , пытались построить самоуправляемые машины, некоторые из которых напоминали животных и людей. Ранние описания автоматов включают искусственных голубей Архита , искусственных птиц Мози и Лу Баня , «говорящего» автомата Героя Александрии , автомата для умывальника Филона Византийского и человеческого автомата, описанного в Ли Цзы .
Раннее начало
Многие древние мифологии и большинство современных религий включают искусственных людей, таких как механические слуги, построенные греческим богом Гефестом ( Вулкан для римлян), глиняные големы из еврейских легенд и глиняные гиганты из скандинавских легенд, а также Галатея , мифическая статуя Пигмалион ожил. Примерно с 400 г. до н.э. мифы Крита включают Талоса , бронзового человека, охранявшего остров от пиратов.
В Древней Греции греческий инженер Ктесибий (ок. 270 г. до н.э.) «применил знания пневматики и гидравлики для создания первых органов и водяных часов с движущимися фигурами». В 4 веке до нашей эры греческий математик Архит из Тарента постулировал механическую птицу, приводимую в действие паром, которую он назвал «Голубь». Герой Александрии (10–70 гг. Нашей эры) , греческий математик и изобретатель, создал множество настраиваемых пользователем автоматических устройств и описал машины, работающие от давления воздуха, пара и воды.
Локапаннатти XI века рассказывает о том, как мощи Будды были защищены механическими роботами (бхута вахана янта) из царства Рома вишая (Рим); пока они не были разоружены королем Ашокой .
В древнем Китае текст Ли Цзы 3-го века описывает рассказ о гуманоидных автоматах, включая гораздо более раннюю встречу между китайским императором Королем Чжоу Му и инженером-механиком, известным как Ян Ши, «изобретателем». Ян Ши с гордостью подарил королю человеческую фигуру в натуральную величину, созданную его механической «работой» из кожи, дерева и искусственных органов. Есть также сообщения о летающих автоматах в Хань Фей Цзы и других текстах, которые приписывают философу- могисту 5-м веку до нашей эры Моцзы и его современнику Лу Баню изобретение искусственных деревянных птиц ( ма юань ), которые могли успешно летать.
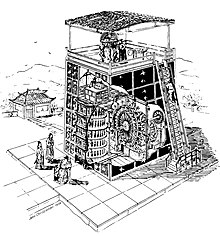
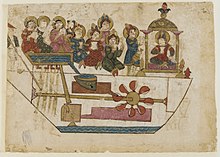
В 1066 году китайский изобретатель Су Сун построил водяные часы в виде башни с механическими фигурками, отбивающими часы. Его механизм имел программируемую драм-машину с штифтами ( кулачками ), которые упирались в маленькие рычаги , управляющие ударными инструментами. Барабанщика можно было заставить играть разные ритмы и разные паттерны ударных, перемещая колышки в разные места.
Самарангана Сутрадхара , санскритский трактат Бходжи (11 век), включает главу о создании механических приспособлений ( автоматов ), в том числе механических пчел и птиц, фонтанов в форме людей и животных, а также кукол мужского и женского пола, которые заполняют масляные лампы, танцуют. , играли на инструментах и воспроизводили сцены из индуистской мифологии.
Мусульманский ученый 13 века Исмаил аль-Джазари создал несколько автоматизированных устройств. Он построил автоматических движущихся павлинов, приводимых в движение гидроэнергетикой. Он также изобрел самые ранние известные автоматические ворота, приводимые в движение гидроэлектростанциями, создал автоматические двери как часть своих сложных водяных часов . Одним из гуманоидных автоматов аль-Джазари была официантка, которая могла подавать воду, чай или напитки. Напиток хранился в емкости с резервуаром, откуда напиток капал в ведро, а через семь минут — в чашку, после чего из автоматической дверцы показывалась официантка, разносящая напиток. Аль-Джазари изобрел автомат для мытья рук со смывным механизмом, который сейчас используется в современных унитазах со смывом . На нем изображена женщина- гуманоид-автомат, стоящая у тазика с водой. Когда пользователь нажимает на рычаг, вода стекает, и женский автомат наполняет таз.
Марк Э. Росхайм резюмирует достижения в области робототехники, достигнутые мусульманскими инженерами, особенно аль-Джазари, следующим образом:
В отличие от греческих образцов, эти арабские образцы демонстрируют интерес не только к драматическим иллюзиям, но и к манипулированию окружающей средой для удобства человека. Таким образом, самым большим вкладом арабов, помимо сохранения, распространения и развития работы греков, была концепция практического применения. Это был ключевой элемент, которого не хватало греческой робототехнике.

В эпоху Возрождения в Италии Леонардо да Винчи (1452–1519) набросал планы робота-гуманоида около 1495 года. В записных книжках да Винчи, вновь открытых в 1950-х годах, содержались подробные чертежи механического рыцаря, известного теперь как робот Леонардо , способного сидеть и махать руки и двигать головой и челюстью. Дизайн, вероятно, был основан на анатомических исследованиях, записанных в его « Витрувианском человеке» . Неизвестно, пытался ли он его построить. Согласно Британской энциклопедии , Леонардо да Винчи, возможно, находился под влиянием классических автоматов аль-Джазари.
В Японии сложные животные и человеческие автоматы были построены в период с 17 по 19 века, многие из них описаны в Каракури дзуи 18 века (« Иллюстрированные машины» , 1796). Одним из таких автоматов была каракури нингё , механизированная марионетка . Существовали различные варианты каракури: каракури Бутай , которые использовались в театре , каракури Дзасики , которые были маленькими и использовались в домашних условиях, и каракури Даши, которые использовались на религиозных фестивалях, где марионетки использовались для воспроизведения традиционных мифы и легенды .
Во Франции между 1738 и 1739 годами Жак де Вокансон выставил несколько автоматов в натуральную величину: флейтист, трубач и утка. Механическая утка могла махать крыльями, вытягивать шею и глотать пищу из руки экспонента, и это создавало иллюзию переваривания пищи, выделяя вещества, хранящиеся в скрытом отсеке.
Системы дистанционного управления
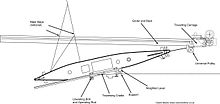
Дистанционно управляемые машины были продемонстрированы в конце 19 века в виде нескольких типов дистанционно управляемых торпед . В начале 1870 — х видел дистанционно управлять торпедами от John Ericsson ( пневматический ), Джон Луи Lay (электрический провод направляется) и Виктор фон Scheliha (электрический провод направляется).
Бреннан торпеда , изобретенный Луи Бреннан в 1877 году, была приведена в действии два вращающихся в противоположных направлениях , винта , которые были спром денных путем быстрого вытаскивания провода от барабанов наматывают внутри торпеды . Дифференциальная скорость на проводах , подключенных к береговой станции позволила торпеде ориентироваться на свою цель, что делает его «первым в мире практического Ракетный». В 1897 году британскому изобретателю Эрнесту Уилсону был выдан патент на торпеду, дистанционно управляемую «герцевскими» (радио) волнами, а в 1898 году Никола Тесла публично продемонстрировал управляемую по беспроводной связи торпеду, которую он надеялся продать ВМС США .
Арчибальд Лоу , известный как «отец систем радионаведения», за свои новаторские работы по управляемым ракетам и самолетам во время Первой мировой войны . В 1917 году он продемонстрировал самолет с дистанционным управлением Королевскому летному корпусу и в том же году построил первую ракету с управляемым проводом.
Происхождение термина «робот»
«Робот» был впервые использован как термин для обозначения искусственных автоматов в пьесе « RUR» 1920 года чешского писателя Карела Чапека . Тем не менее, Йозеф Чапек был назван своим братом Карел настоящим изобретателем термина «робот». Само слово «робот» не было новым, поскольку в славянском языке оно использовалось как робот (подневольный рабочий), термин, который классифицировал крестьян, обязанных нести обязательную службу в рамках феодальной системы (см. Патент на роботов ). Художественная история Чапека постулировала технологическое создание искусственных человеческих тел без души, и старая тема феодального класса роботов красноречиво соответствовала воображению нового класса искусственно созданных рабочих.
Английское произношение этого слова эволюционировало относительно быстро с момента его появления. В США в конце 30-х — начале 40-х годов второй слог произносился с длинной буквы «О», как «гребная лодка». К концу 50-х — началу 60-х некоторые произносили его с короткой «U», как «row-but», в то время как другие использовали более мягкую «O», например, «row-buy». К 70-м годам преобладающим стало его нынешнее произношение «гребешок».
Ранние роботы

В 1928 году один из первых роботов-гуманоидов, Эрик , был представлен на ежегодной выставке Общества инженеров моделей в Лондоне , где выступил с речью. Рама робота, изобретенная У.Х. Ричардсом, состояла из алюминиевого корпуса с одиннадцатью электромагнитами и одним двигателем, работающим от источника питания на двенадцать вольт. Робот мог двигать руками и головой, им можно было управлять с помощью пульта дистанционного управления или голосового управления. И Эрик, и его «брат» Джордж гастролировали по миру.
Компания Westinghouse Electric Corporation построила Televox в 1926 году; это был картонный вырез, подключенный к различным устройствам, которые пользователи могли включать и выключать. В 1939 году робот-гуманоид, известный как Elektro, был представлен на Всемирной выставке 1939 года в Нью-Йорке . Семь футов высотой (2,1 м) и весом 265 фунтов (120,2 кг), он мог ходить по голосовой команде, говорить около 700 слов (используя проигрыватель с 78 оборотами в минуту ), курить сигареты, надувать воздушные шары и двигать головой и руками. . Кузов состоял из стальной шестерни, кулачка и моторного каркаса, покрытого алюминиевой обшивкой. В 1928 году биолог Макото Нисимура разработал и сконструировал первого японского робота Гакутенсоку .
Современные автономные роботы
Первые электронные автономные роботы со сложным поведением были созданы Уильямом Греем Уолтером из Неврологического института Бэрдена в Бристоле , Англия, в 1948 и 1949 годах. Он хотел доказать, что богатые связи между небольшим количеством клеток мозга могут привести к очень сложному поведению — По сути, секрет того, как работает мозг, заключается в том, как он устроен. Его первые роботы, названные Элмером и Элси , были сконструированы между 1948 и 1949 годами и часто описывались как черепахи из-за их формы и медленной скорости движения. Трехколесные роботы-черепахи были способны к фототаксису , с помощью которого они могли найти путь к зарядной станции, когда у них разряжалась батарея.
Уолтер подчеркнул важность использования чисто аналоговой электроники для моделирования процессов в мозге в то время, когда его современники, такие как Алан Тьюринг и Джон фон Нейман, все обращались к взглядам на психические процессы с точки зрения цифровых вычислений . Его работа вдохновила последующие поколения исследователей робототехники, таких как Родни Брукс , Ханс Моравек и Марк Тилден . Современные воплощения черепах Уолтера можно найти в виде робототехники BEAM .

Первый программируемый робот с цифровым управлением был изобретен Джорджем Деволом в 1954 году и в конечном итоге получил название Unimate . Это в конечном итоге заложило основы современной индустрии робототехники. Devol продала первый Unimate компании General Motors в 1960 году, а в 1961 году он был установлен на заводе в Трентоне, штат Нью-Джерси, для подъема горячих металлических изделий из машины для литья под давлением и их штабелирования. Патент Devol на первую программируемую роботизированную руку с цифровым управлением представляет собой основу современной индустрии робототехники.
Первый робот- палетоукладчик был представлен в 1963 году компанией Fuji Yusoki Kogyo. В 1973 году робот с шестью осями с электромеханическим приводом был запатентован компанией KUKA robotics в Германии, а программируемая универсальная манипуляторная рука была изобретена Виктором Шейнманом в 1976 году, и эта конструкция была продана Unimation .
В настоящее время широко используются коммерческие и промышленные роботы, выполняющие работу дешевле или с большей точностью и надежностью, чем люди. Они также используются на работах, которые слишком грязные, опасные или унылые, чтобы подходить для людей. Роботы широко используются в производстве, сборке и упаковке, транспорте, исследовании земли и космоса, хирургии, оружии, лабораторных исследованиях и массовом производстве потребительских и промышленных товаров.
Будущее развитие и тенденции
| Внешнее видео | |
|---|---|
 Атлас, следующее поколение Атлас, следующее поколение |
Появились различные методы развития науки о робототехнике и роботах. Один из методов — это эволюционная робототехника , в которой на испытания проходят несколько различных роботов. Те, которые работают лучше всего, используются в качестве модели для создания следующего «поколения» роботов. Другой метод — развивающая робототехника , которая отслеживает изменения и развитие в рамках одного робота в областях решения проблем и других функций. Совсем недавно был представлен еще один новый тип роботов, который действует как смартфон и робот, и называется RoboHon.
По мере того, как роботы становятся более продвинутыми, в конечном итоге может появиться стандартная компьютерная операционная система, предназначенная в основном для роботов. Операционная система роботов — это набор программ с открытым исходным кодом, разрабатываемых, в частности, в Стэнфордском университете , Массачусетском технологическом институте и Техническом университете Мюнхена , Германия. ROS предоставляет способы программирования навигации и конечностей робота независимо от конкретного задействованного оборудования. Он также предоставляет команды высокого уровня для таких элементов, как распознавание изображений и даже открытие дверей. Когда ROS загружается на компьютер робота, он получает данные об атрибутах, таких как длина и движение конечностей роботов. Он будет передавать эти данные в алгоритмы более высокого уровня. Microsoft также разрабатывает систему «Windows для роботов» с помощью Robotics Developer Studio, доступной с 2007 года.
Япония надеется на полномасштабную коммерциализацию сервисных роботов к 2025 году. Многие технологические исследования в Японии проводятся под руководством японских правительственных учреждений, в частности Министерства торговли.
Многие будущие приложения робототехники кажутся людям очевидными, хотя они намного превосходят возможности роботов, доступные на момент прогноза. Еще в 1982 году люди были уверены, что когда-нибудь роботы будут: 1. Очищать детали, удаляя опалубку 2. Распылять краску на автомобили без какого-либо присутствия человека 3. Упаковывать вещи в коробки — например, ориентировать и складывать шоколадные конфеты в коробки для конфет 4. Сделайте жгут электрических кабелей 5. Загружайте в грузовики ящики — проблема с упаковкой 6. Работайте с мягкими товарами, такими как одежда и обувь 7. Стрижка овец 8. Протезы 9. Готовьте фаст-фуд и работайте в других сферах обслуживания 10. Домашний робот.
Обычно такие прогнозы излишне оптимистичны по срокам.
Новые функции и прототипы
В 2008 году компания Caterpillar Inc. разработала самосвал, который может двигаться самостоятельно без участия человека. Многие аналитики считают, что беспилотные грузовики со временем могут произвести революцию в логистике. К 2014 году у Caterpillar появился самосвал с автоматическим управлением, который, как ожидается, существенно изменит процесс добычи полезных ископаемых. В 2015 году эти самосвалы Caterpillar активно использовались на горнодобывающих предприятиях в Австралии горнодобывающей компанией Rio Tinto Coal Australia . Некоторые аналитики полагают, что в ближайшие несколько десятилетий большинство грузовиков будут автономными.
Грамотный или «читающий робот» по имени Мардж обладает интеллектом, который исходит от программного обеспечения. Она может читать газеты, находить и исправлять слова с ошибками, узнавать о банках, таких как Barclays, и понимать, что одни рестораны лучше, чем другие.
Baxter — это новый робот, представленный в 2012 году, который обучается под руководством. Рабочий может научить Бакстера выполнять задание, двигая руками в желаемом направлении и запоминая их. На руке Baxter имеются дополнительные циферблаты, кнопки и элементы управления для большей точности и функциональности. Любой штатный работник может запрограммировать Baxter, и это займет всего несколько минут, в отличие от обычных промышленных роботов, которые требуют обширных программ и кодирования для использования. Это означает, что Baxter не нуждается в программировании для работы. Никаких программных инженеров не требуется. Это также означает, что Бакстера можно научить выполнять несколько более сложных задач. Sawyer был добавлен в 2015 году для более мелких и точных задач.
Этимология

Слово « робот» представил публике чешский писатель периода межвоенного периода Карел Чапек в его пьесе « RUR» (Универсальные роботы Россума) , опубликованной в 1920 году. Действие пьесы начинается на фабрике, которая использует химический заменитель протоплазмы для производства живых упрощенных людей, называемых роботами. . В пьесе нет подробного описания технологии, лежащей в основе создания этих живых существ, но по своему внешнему виду они прообразуют современные представления об андроидах , существах, которых можно принять за людей. Этих массово производимых рабочих изображают эффективными, но бесчувственными, неспособными к оригинальному мышлению и равнодушными к самосохранению. Проблема заключается в том, эксплуатируются ли роботы, и в последствиях зависимости человека от товарного труда (особенно после того, как ряд специально разработанных роботов достигли самосознания и побудили роботов по всему миру восстать против людей).
Сам Карел Чапек это слово не придумал. Он написал короткое письмо со ссылкой на этимологию из Оксфордского словаря английского языка, в котором назвал своего брата, художника и писателя Йозефа Чапека , в качестве его истинного создателя.
В статье, опубликованной в чешском журнале Lidové noviny в 1933 году, он объяснил, что изначально хотел называть существ labři («рабочие», от латинского « труд» ). Однако ему не понравилось это слово, и он попросил совета у своего брата Йозефа, который предложил «роботи». Слово robota буквально означает « барщинный », «крепостной труд» и, образно говоря, «тяжелая работа» или «тяжелая работа» на чешском языке, а также (в более общем смысле ) «работа», «труд» на многих славянских языках (например, болгарском , русском , Сербский , словацкий , польский , македонский , украинский , архаичный чешский , а также робот на венгерском ). Традиционно Робота (венгерский робот ) была работа период крепостным ( барщина ) должен был отдать за своего господина, как правило , 6 месяцев в году. Происхождение слова — старославянское ( староболгарское ) rabota «рабство» («работа» в современном болгарском и русском языках ), которое, в свою очередь, происходит от протоиндоевропейского корня * orbh- . Робот является родственным от немецкого корня Arbeit (работа).
Слово робототехника , используемое для описания этой области исследований, было придумано писателем-фантастом Айзеком Азимовым . Азимов создал « Три закона робототехники », которые постоянно встречаются в его книгах. С тех пор они использовались многими другими для определения законов, используемых в художественной литературе. (Эти три закона — чистая выдумка, и ни одна из созданных технологий не способна понять их или следовать им, и на самом деле большинство роботов служат военным целям, что совершенно противоречит первому закону, а часто и третьему закону ». Люди думают о Азимове. законы, но они были созданы, чтобы показать, как простая этическая система не работает. Если вы читаете рассказы, каждый из них говорит о провале, и они абсолютно непрактичны », — сказала доктор Джоанна Брайсон из Университета ванны.)
Современные роботы

Мобильный робот
Мобильные роботы могут перемещаться в своей среде и не привязаны к одному физическому месту. Примером мобильного робота, который широко используется сегодня, является автомобиль с автоматическим управлением или автомобиль с автоматическим управлением (AGV). AGV — это мобильный робот, который следует по маркерам или проводам на полу, использует видение или лазеры. AGV обсуждаются позже в этой статье.
Мобильные роботы также используются в промышленности, в военной сфере и в сфере безопасности. Они также появляются как потребительские товары, для развлечения или для выполнения определенных задач, таких как уборка пылесосом. Мобильные роботы являются предметом большого количества текущих исследований, и почти в каждом крупном университете есть одна или несколько лабораторий, которые специализируются на исследованиях мобильных роботов.
Мобильные роботы обычно используются в жестко контролируемой среде, например на сборочных линиях, потому что им трудно реагировать на неожиданные помехи. Из-за этого большинство людей редко сталкивается с роботами. Однако домашние роботы для уборки и обслуживания все чаще встречаются в домах и вокруг них в развитых странах. Роботы также используются в военных целях.
Промышленные роботы (манипуляторы)

Промышленные роботы обычно состоят из шарнирной руки (многосвязного манипулятора) и концевого эффектора , прикрепленного к неподвижной поверхности. Одним из наиболее распространенных типов концевых эффекторов является захватный узел.
Международная организация по стандартизации дает определение манипулирует промышленный робот в ISO 8373 :
«Автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям, который может быть либо фиксированным на месте, либо мобильным для использования в приложениях промышленной автоматизации».
Это определение используется Международной федерацией робототехники , Европейской исследовательской сетью робототехники (EURON) и многими национальными комитетами по стандартам.
Сервисный робот
Чаще всего промышленные роботы представляют собой стационарные роботизированные манипуляторы и манипуляторы, используемые в основном для производства и распределения товаров. Термин «сервисный робот» имеет менее четкое определение. Международная федерация робототехники предложила предварительное определение, «Робот сервиса является роботом , который работает полу- или полностью автономно выполнять услуги , полезные для благополучия людей и оборудования, за исключением производственных операций.»
Обучающие (интерактивные) роботы
Роботы используются в качестве помощников учителей. С 1980-х годов в школах использовались такие роботы, как черепахи, и их программировали с использованием языка логотипов .
Существуют наборы роботов, такие как Lego Mindstorms , BIOLOID , OLLO от ROBOTIS или Образовательные роботы BotBrain, которые могут помочь детям узнать о математике, физике, программировании и электронике. Робототехника также вошла в жизнь учеников начальной и старшей школы в форме соревнований роботов с компанией FIRST (За вдохновение и признание науки и технологий). Организация является основой для соревнований FIRST Robotics Competition , FIRST LEGO League , Junior FIRST LEGO League и FIRST Tech Challenge .
Были также роботы, такие как обучающий компьютер Leachim (1974). Leachim был ранним примером синтеза речи с использованием метода синтеза Diphone . 2-XL (1976) был игровой / обучающей игрушкой в форме робота, основанной на разветвлении между звуковыми дорожками на 8-дорожечном магнитофоне , изобретенными Майклом Дж. Фриманом . Позже 8-дорожечная версия была преобразована в кассеты с магнитной лентой, а затем в цифровую.
Модульный робот
Модульные роботы — это новое поколение роботов, которые предназначены для увеличения использования роботов за счет модульного построения их архитектуры. Функциональность и эффективность модульного робота легче повысить по сравнению с обычными роботами. Эти роботы состоят из одного типа идентичных, нескольких разных одинаковых типов модулей или модулей схожей формы, которые различаются по размеру. Их архитектурная структура обеспечивает гипер-избыточность для модульных роботов, поскольку они могут иметь более 8 степеней свободы (DOF). Создание программирования, обратной кинематики и динамики для модульных роботов сложнее, чем для традиционных роботов. Модульные роботы могут состоять из L-образных модулей, кубических модулей, а также U- и H-образных модулей. Технология ANAT, ранняя модульная роботизированная технология, запатентованная Robotics Design Inc., позволяет создавать модульные роботы из U- и H-образных модулей, которые соединяются в цепочку и используются для формирования гетерогенных и однородных модульных робототехнических систем. Эти «роботы ANAT» могут быть спроектированы с «n» степенями свободы, поскольку каждый модуль представляет собой законченную моторизованную роботизированную систему, которая складывается относительно модулей, соединенных до и после него в своей цепочке, и, следовательно, один модуль допускает одну степень свободы. Чем больше модулей подключено друг к другу, тем больше у него будет степеней свободы. L-образные модули также могут быть спроектированы в виде цепочки, и они должны становиться все меньше по мере увеличения размера цепи, поскольку полезные нагрузки, прикрепленные к концу цепи, создают большую нагрузку на модули, расположенные дальше от основания. H-образные модули ANAT не страдают от этой проблемы, так как их конструкция позволяет модульному роботу равномерно распределять давление и удары между другими присоединенными модулями, и, следовательно, грузоподъемность не уменьшается с увеличением длины руки. Модульные роботы можно перенастроить вручную или самостоятельно, чтобы сформировать другого робота, который может выполнять разные приложения. Поскольку модульные роботы одного и того же типа архитектуры состоят из модулей, составляющих разных модульных роботов, робот со змеиными руками может объединяться с другим, образуя двухручный или четырехрукий робот, или может разделяться на несколько мобильных роботов, а мобильные роботы могут разделяться. на несколько меньших или объединить с другими в более крупный или другой. Это позволяет одному модульному роботу быть полностью специализированным для решения одной задачи, а также специализироваться для выполнения нескольких различных задач.
Модульная робототехника в настоящее время применяется в гибридном транспорте, промышленной автоматизации, очистке воздуховодов и транспортировке. Многие исследовательские центры и университеты также изучали эту технологию и разработали прототипы.
Коллаборативные роботы
Совместный робот или cobot это робот , который может безопасно и эффективно взаимодействовать с человеческими работниками во время выполнения простых производственных задач. Тем не менее, рабочие органы и другие условия окружающей среды могут создавать опасность, и поэтому оценка рисков должна выполняться перед использованием любого промышленного приложения для управления движением.
Коллаборативные роботы, которые сегодня наиболее широко используются в промышленности, производятся Universal Robots в Дании.
Компания Rethink Robotics, основанная Родни Бруксом , ранее работавшая в iRobot, представила компанию Baxter в сентябре 2012 года; как промышленный робот, предназначенный для безопасного взаимодействия с соседними людьми-работниками и программируемый для выполнения простых задач. Бакстеры останавливаются, если обнаруживают человека на пути своих роботизированных рук и имеют заметные выключатели. Предназначенные для продажи малому бизнесу, они продвигаются как роботизированный аналог персонального компьютера. По состоянию на май 2014 года 190 компаний в США купили Baxters, и они используются в коммерческих целях в Великобритании.
Роботы в обществе

Примерно половина всех роботов в мире находится в Азии, 32% — в Европе, 16% — в Северной Америке, 1% — в Австралии и 1% — в Африке. 40% всех роботов в мире находятся в Японии , что делает Японию страной с наибольшим количеством роботов.
Роботы: что это такое и какими они бывают

Пчела, собака, геккон, актиния, мерчендайзер, шахматист, пылесос, планетоход: это странное перечисление можно объединить одним словом — роботы. Разбираемся, что такое современный робот и для чего он нужен.
Терминология
- Говоря простым языком, робот (от чеш. robota, подневольный труд) — это кибернетическая система, которая может выполнять операции, относящиеся к физической и умственной деятельности человека. Робот включает в себя программируемую систему управления, которая контролирует механическую конструкцию, а также связывает робота с внешней средой (оборудованием и пользователем).
- Более точное определение робота и связанных с ним понятий дается в стандартах ГОСТ Р ИСО 8373-2014 «Роботы и робототехнические устройства. Термины и определения» и в соответствующем международном стандарте ISO 8373:2012 «Robots and robotic devices — Vocabulary» : «Робот — приводной механизм, который можно запрограммировать по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий задачи по предназначению», где «автономность — способность выполнять задачи по предназначению, основанная на текущем состоянии изделия и особенностях считывания данных без вмешательства человека».
- Наконец, в более широком понимании современный робот — механизм, выполняющий запрограммированные действия, который воспринимает окружающий мир с помощью сенсоров (датчиков, микрофонов, камер), строит модели поведения, чтобы выполнять определенную программу, и способен воздействовать на физический мир тем или иным способом.
Краткая история роботизации
За последние 100 лет роботы не просто эволюционировали, они стали частью нашей повседневной жизни. Слово «робот» вошло в обиход после того, как в 1920 году свет увидела пьеса Карла Чапека об искусственных людях. И это очень символично, так как «ревущие» двадцатые — период экономического подъема и новых открытий в науке и технике.
В течение последующих десятилетий произошли выдающиеся открытия в самых различных дисциплинах — кибернетика, мехатроника, информатика, электроника, механика, а именно на них и опирается робототехника. Примерно к 30-м годам XX века появились первые андроиды, которые могли двигаться и произносить простейшие фразы.
Первые программируемые механизмы с манипуляторами были сконструированы в 1930-х годах в США. Толчком послужили работы Генри Форда по созданию автоматизированной производственной линии. На рубеже 1930-40-х годов в СССР появились автоматические линии для обработки деталей подшипников, а в конце 1940-х годов было впервые в мире создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1950 году Тьюринг в работе «Computing Machinery and Intelligence» описал способ, позволяющий определить, является ли машина мыслящей (тест Тьюринга). В 1950-х годах появились первые механические манипуляторы, которые копировали движения рук оператора и могли работать с радиоактивными материалами. В 1956 году американские инженеры Джозеф Девол и Джозеф Энгельберг организовали первую в мире компанию «Юнимейшн» (англ. Unimation, сокращенный термин от Universal Automation, универсальная автоматика), и в начале 1960-х первый в мире промышленный робот начал работать на производственной линии завода General Motors.
Роботы-хирурги, печать органов, «умный» пластырь. Кейсы о цифровой медицине.

Робот Unimate, которого отправили на фабрику General Motors
В 1960-х годах в университетах появились лаборатории искусственного интеллекта, а 1970-х были создали микропроцессорные системы управления, которые заменили специализированные блоки управления роботов на программируемые контроллеры. Это сократило стоимость роботов примерно в три раза, так что они стали всё чаще применяться в разных отраслях промышленности. В 1982 году в IBM разработали официальный язык для программирования робототехнических систем, а спустя два года компания Adept представила первый робот Scara с электроприводом. В 1986 году роботы были впервые применены в Чернобыле для очистки радиоактивных отходов.
Двадцать первый век принёс невиданные успехи в развитии робототехники. В 2000 годы, по данным ООН, в мире использовалось уже 742 500 промышленных роботов. Невозможно перечислить все новые модели и открытия в сфере робототехники за последние 20 лет. Вот лишь некоторые из них.
В начале 2000-х многие компании представили новых гуманоидных роботов — например, Asimo от Honda и SDR-3X от Sony. Канадский космический манипулятор Canadarm2 использовался для завершения сборки МКС, а в мюнхенском Институте биохимии имени Макса Планка был создан первый в мире нейрочип. Появились первые серийно выпускаемые бытовые роботы-пылесосы (Electrolux) и первая киберсобака (Sanyo Electric). Компания Bandai представила прототип робота с возможностью распознавания человеческих лиц и голосов, ученые из Стэнфордского университета — робота STAIR (Stanford Artificial Intelligence Robot), наделенного интеллектом и способного принимать нестандартные решения, руководствуясь заложенными в него знаниями об окружающем мире. Военный робот смог распознавать и преодолевать препятствия — в NASA взяли на вооружение экзоскелет X1 Robotic Exoskeleton. Роботы стали активно использоваться в медицине при проведении хирургических операций.

Три поколения роботов
- Роботы первого поколения, освоенные промышленностью в 1960-х годах, работали по жесткой программе, не могли адаптироваться к изменяющимся условиям производства и внешней среды, а на входе требовали упорядоченного размещения ориентированных деталей в накопителе. Некоторые из первых промышленных роботов «Версатран» и «Юнимейт» функционируют до сих пор, преодолев порог в 100 тысяч часов рабочего времени.
- Роботы второго поколения работают по гибкой программе и используются для выполнения сложных производственных задач, например, для сборки прецизионных изделий. Прецизионный — обладающий высокой точностью или созданный с соблюдением высокой точности параметров. У таких роботов более развитый сенсорный аппарат, который обеспечивает работу по принципу «ситуация — действие» и способен выбрать оптимальный алгоритм функционирования в зависимости от хода производственного процесса.
- Роботы третьего поколения — это уже интегральные или интеллектуальные системы, оснащенные новейшими средствами адаптации. Они имеют способность к самообучению и распознаванию образов, которая является важным элементом искусственного интеллекта. С развитием ИИ роботы получают возможность моделировать внешнюю среду, анализировать производственную обстановку, принимать решения и планировать собственные действия.
Классификации роботов
В зависимости от общей прикладной области роботов можно разделить на промышленных и сервисных. На сегодняшний день в мире больше промышленных роботов, но ниша сервисных растет с огромной скоростью.
Что такое промышленный робот
Промышленный робот состоит из манипулятора, в том числе приводов, и контроллера, включая пульт обучения и аппаратный или программный коммуникационный интерфейс. Манипулятор робота можно программировать по трем или более степеням подвижности в зависимости от задач автоматизации. Проще говоря, промышленная робототехника предназначена для выполнения основных и вспомогательных операций производственного цикла без участия человека. По данным аналитического отчета Сбербанка, на сегодня на производстве задействовано около двух миллионов роботов.
Общая классификация промышленных роботов содержит от 7 до 12 классификационных признаков (в зависимости от информационного источника). Вот несколько примеров частных классификаций по наиболее важным признакам.
По характеру выполняемых операций промышленные роботы делятся на:
- технологические (выполняют основные операции — обработку, сборку, сварку, окраску);
- вспомогательные (используют для обслуживания основного технологического оборудования: установка — снятие заготовок, транспортно-складские и другие операции);
- универсальные (сочетают признаки первых двух групп).
По характеру обработки программы промышленные роботы могут быть:
- жесткопрограммируемые (программа действий содержит информацию, не меняющуюся в процессе работы);
- адаптивные (содержат информацию об объектах и условиях внешней среды. Сенсорное оснащение позволяет таким роботам корректировать управляющую программу);
- гибкопрограммируемые (способны формировать программу своих действий на основе поставленной цели и информации об объектах и условиях внешней среды).
Области применения промышленных роботов
Промышленные роботы дают возможность автоматизировать все виды операций. Сфера применения довольно широка: заготовительное производство, механообработка, сварочное производство, сборочное производство, термообработка, гальванические и лакокрасочные покрытия, транспортно-накопительные системы. В обрабатывающей промышленности отрасли лидеры по покупкам роботов не меняются уже более пяти лет: это автомобильная промышленность и электроника.
«В компании ПАО “КАМАЗ” применяются промышленные роботы типа “рука-манипулятор”, что характерно для автомобильной промышленности по всему миру. Это классические 6-осевые манипуляторы, которые используются в таких производственных процессах, как сварка, окраска, наплавка, перемещение заготовок, а также для задач, выполняемых сканирующими/измерительными системами и обучения».

Промышленные роботы Kuka
Роботы применяются практически во всех отраслях промышленности, их целесообразность применения диктуется прежде всего интересами человека, удобством и безопасностью работы.
Самая важная роль отводится роботам, заменяющим человека при выполнении различных задач в экстремальных условиях: на больших глубинах, в вакууме, в космосе, на участках с радиационно- взрыво- и пожароопасными условиями, а также на химических и фармацевтических производствах.

«Химические склады являются зонами повышенной опасности, где стоимость человеческой ошибки крайне велика. В таких местах мы применяем роботов, оснащенных инфракрасными сканерами, способных по штрихкоду самостоятельно находить реактивы на складе, перемещать и упаковывать реактивы для отправки, чтобы делать процесс максимально безопасным и защищенным. Роботы, используемые для работы с биологическими клетками, отбирают образцы клеток иглами обеспечивают точность и скорость, не достижимую для человека. Например, робот способен направлять иглу на объект с точностью 0,1 мм и делать это мгновенно. Создание химических библиотек требует хранения тысяч образцов и скорого их поиска в случае необходимости. Робот, имея цифровую картотеку расположения образцов в хранилище и механический манипулятор, может мгновенно находить и передавать исследователям искомый образец.
Роботизированные манипуляторы повсеместно используются на линиях фасовки лекарств, производства стерильных фильтров и обеспечивают качество продукции за счет отсутствия контаминантов биологического происхождения и высокой точности манипуляций».
Что такое кобот
Коллаборативный робот (кобот) — это вариант промышленного робота, который также состоит из манипулятора и перепрограммируемого устройства управления. Кардинальное отличие кобота в том, что он может работать совместно с человеком для создания или производства различных продуктов.
«Коботы — новое поколение роботов с сило-моментными датчиками и техническим зрением, которые позволяют распознавать человека в окружающей производственной среде. Благодаря этим техническим особенностям, простоте обучения и эксплуатации коботов стало возможным их использование без защитных ограждений и систем безопасности. Благодаря этому цена интеграции кобота в разы ниже цены интеграции обычного промышленного робота».
Первого кобота изобрели в 1999 году Эд Колгейт и Майкл Пэшкин, инженеры Северо-Западного университета. Большинство коллаборативных роботов имеют небольшие размеры (вес — 15-20 кг, в некоторых случаях — до 50 кг, высота — около 1,5 м).
Согласно международному стандарту ISO 10218, есть четыре типа коллаборативных роботов:
- с защитным механизмом остановки; когда при приближении человека кобот считывает движение с помощью датчиков и останавливается, пока человек не уйдет из рабочего пространства;
- с ручным управлением; робот дополнен специальными устройствами, распознающими давление руки. Когда робот не обучается, а выполняет свои прямые функции, человек должен находиться за границами его рабочей зоны;
- с системой «компьютерного зрения», которые отслеживают перемещения работников-людей и замедляются до безопасной скорости или вообще останавливаются при приближении человека;
- с ограничением силы; если робот чувствует сильное сопротивление на пути, он останавливается.
Основная сфера применения коботов — автомобилестроение и производство электроники, а самыми популярными операциями являются погрузка/перемещение и сборка.

Кобот YuMi от ABB
Что такое сервисный робот
Сервисный робот — это робот, выполняющий полезную работу для людей и оборудования, исключая промышленные задачи по автоматизации.
Сервисная робототехника делится на два типа — для личного применения (роботы-пылесосы, развлекательные роботы, роботы-помощники) и для профессионального, то есть для оказания различных услуг (полевая, подводная робототехника, медицина, мониторинг и эксплуатация, строительство и снос, логистические системы, мобильные платформы, военные роботы, подводные системы, силовые экзоскелеты и так далее).
Кейсы применения сервисных роботов очень разнообразны. Например, американская компания SIMBE ROBOTICS разработала мобильного робота для аудита товарных полок в розничных магазинах. Робот перемещается между стеллажами и сканирует их содержимое, определяя, в том числе, не заканчивается ли товар и тот ли товар вообще выложен. Он безопасен для сотрудников и посетителей магазина, поэтому может выполнять аудит в любое время, а данные обо всех товарах сохраняет в облако. А вот другой робот от компании Fellow Robots — идеальный торговый консультант, который сопровождает покупателей в магазине и может порекомендовать им тот или иной товар на 25 языках.

Компания Locus Robotics в начале 2020 года отпраздновала юбилей — ее автономные мобильные роботы перенесли 100 миллионов посылок. Locus Robotics сотрудничает с крупнейшими транспортными компаниями, среди которых DHL, GEODIS, Port Logistics. Bossa Nova Robotics планирует обеспечить роботами для инвентаризации товаров в 1000 магазинов Walmart в США. В США также разрабатываются роботы, которые будут помогать на заправке. А в Японии давно в ходу роботы — бармены и повара.

Современный робот может ходить вниз «головой» по потолку или работать на глубине, поэтому в его сходстве с человеком нет особой необходимости. Однако работа над созданием андроидов и гиноидов (роботов в женском обличии) захватила умы многих изобретателей в последние десятилетия. Практически все развитые страны представили своих андроидов, обладающих самыми разными функциями и интерфейсом, максимально напоминающим человеческое тело.
В 2010 году в Китае для человекоподобных роботов провели Олимпийские игры, где андроиды соревновались в разных спортивных дисциплинах. К участию допускались автономные роботы, полуавтономные системы и устройства с дистанционным управлением, и каждый класс соревновался только с себе подобными. Гиноид София стала первым роботом, который получил официальное гражданство Саудовской Аравии. В России есть собственные разработки: например, один из последних российских роботов андроидов — Бетси, антропоморфный робот с возможностью нейроуправления.

Как будут развиваться роботы
Сложно представить, что только не будут уметь роботы в ближайшие десятилетия. Уже созданы роботизированные мышцы, которые в 1000 раз сильнее человеческих и способны поднимать грузы в 50 раз больше собственного веса. Дальнейшее развитие роботов будет связано с открытием новых материалов и свойств, а также достижений компьютерной техники.
Программное обеспечение манипуляторов со временем увеличит возможности техники и сенсоров. Например, робот-манипулятор, захватывающая груз, сможет сообщить оператору точный вес или размер, а новые компьютерные технологии смогут обеспечить более сложные траектории. Будет повышена эффективность использования нейросетей за счет усложнения их архитектуры и снижения энергопотребления. Продолжится массовое внедрение облачных сервисов для машинного обучения, что расширит двигательные действия роботов.
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Что такое робототехника? Классификация, история и области применения роботов

Робототехника — отдел прикладной науки, который занимается проектированием, производством и применением автоматизированных технических систем — роботов. Робот — это программируемое механическое устройство, способное действовать без помощи человека.
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком либо животными. При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
Роботы бывают манипуляционными и мобильными:
- За исполнение действий манипуляционного робота отвечает манипулятор с несколькими степенями подвижности и устройство программного обеспечения. Манипуляционные роботы получили большое распространение в машиностроительных и приборостроительных отраслях.
- Мобильный робот более подвижен, чем манипуляционный, поскольку у него есть движущееся шасси с автоматически управляемыми приводами — «мышцами» роботов.
Навигация по материалу:
- 1 Классификация мобильной робототехники по типу перемещения
- 2 Пример устройства робота — элементы и конструкция
- 3 Основные компоненты робототехники
- 4 Области применения робототехники
- 5 Какие знания необходимы для создания робототехники?
- 6 История развития робототехники за последние 100 лет
Классификация мобильной робототехники по типу перемещения
Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Внешний вид и конструкция современных роботов могут быть весьма разнообразными.
Робототехника может перемещаться по любой поверхности, в воде и в воздухе. Так, по типу передвижения роботы бывают:
- Колесные и гусеничные (наиболее распространенный вид роботов);
- Шагающие;
- Летающие — автопилоты и беспилотные летательные аппараты;
- Ползающие — передвигаются по принципу змей и червей и применяются для поиска людей под обломками рухнувших зданий;
- Плавающие — перемещаются в воде, подражая движениям рыб, и тем самым становятся бесшумными и очень маневренными;
- Передвигающиеся по вертикальным поверхностям — действуют по принципу человека, взбираясь на стену с помощью выступов, или же с помощью специальных присосок.
Лидерами в производстве роботов на данный момент являются компании FANUC (Япония), KUKA (Германия) и ABB (Швеция, Швейцария).
Пример устройства робота — элементы и конструкция
Каждый робот состоит из следующих базовых компонентов:
- Рама или тело робота;
- Блок управления;
- Манипуляторы;
- Ходовая часть.
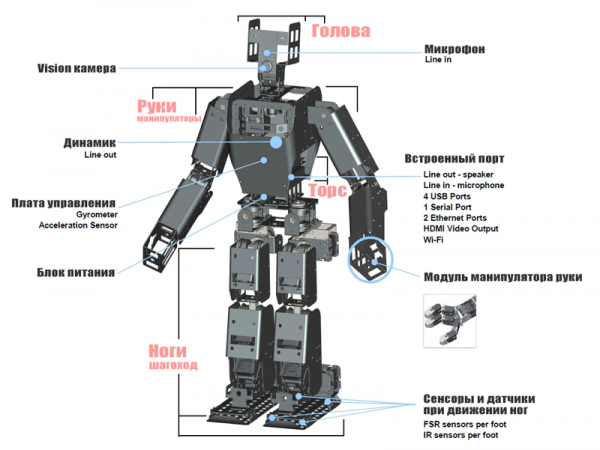
- Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением). Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
- Система управления: Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
- Манипуляторы: Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
- Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Робот может быть любых форм и размеров. Именно рама или тело робота является основой его конструкции и определяет внешний облик. Среднестатистический человек при слове «робот» представляет человекоподобное существо из металла. Этот образ навязан многочисленными фантастическими кинофильмами.
На самом же деле большинство роботов совершенно не похоже на человека. Главное для робота – это его функциональность, а не то, как он выглядит.
Контроль за работой робота осуществляется при помощи системы управления. Она включает в себя огромное количество датчиков, которые помогают технике взаимодействовать с внешним миром.

Система управления роботом предполагает целый набор алгоритмов, благодаря которым решаются те или иные задачи. В работе робота происходит постоянный обмен данными между датчиками и центральным процессором (ЦП). Алгоритмы и программное обеспечение создаются человеком.
Для физического контакта с объектами внешней среды используется манипулятор. Данный элемент не является обязательным. Как правило, манипулятор не является частью рамы/тела робота. Используется для решения конкретных задач в различных отраслях.
Ходовая часть робота также не является обязательной, и наличествует лишь у тех роботов, которым необходимо передвижение в пространстве. В качестве средств для перемещения чаще всего используются колеса.
Основные компоненты робототехники
Корпус большинства роботов состоит из отдельных подвижных и неподвижных частей. Вот основные из них:
Внутренний контроллер. Каждый робот оснащен контроллером — компьютерной операционной системой. Контроллер — это мозг любого робота. Он содержит всю необходимую информацию для выполнения задач и указаний.
Источник энергии. Роботам необходим источник энергии. Одни работают от батарей. Другие оснащены фотоэлементами, которые преобразуют солнечный свет в энергию. Механические роботы заводятся с помощью пружинного механизма.
Дистанционное управление. Роботы, которые работают на других планетах, такие как марсоход, оборудованы внутренними контроллерами, но ими также можно управлять с Земли.
Сенсоры света и звука. С их помощью робот может распознавать свет, исходящий от объектов, определять звуковые волны. Эта функция помогает либо обходить различные предметы, либо идти к ним навстречу. Также в корпус робота может быть встроено устройство распознавания голоса, с помощью которого человек отдает машине устные приказы.
Датчики давления. Некоторые роботы оборудованы датчиками давления, которые имитируют осязание. У этих сенсоров два назначения: они сообщают роботу о том, что он ударился о какой-нибудь предмет и должен сменить направление движения, а также позволяют правильно захватить и поднять объект.
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух. Перечислим все основные варианты приводов для робототехники:
- Двигатели постоянного тока: В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
- Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определенный угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как контроллеру точно известно, на сколько был сделан поворот. В связи с этим они часто используются в приводах многих роботов и станках с ЧПУ.
- Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы совершенно отличается: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
- Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом, мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
- Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Однако, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все неэффективны или непрочны.
- Эластичные нанотрубки: Это многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет этому волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменен проводом из такого материала диаметром 8 мм. Такие компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Области применения робототехники
Применяются роботы самых различных сферах, но основными являются следующие:
- Промышленность: промышленные роботы;
- Исследовательская деятельность: роботы-ученые, исследователи;
- Боевые роботы: безпилотники, роботы-саперы, охрана и безопасность;
- Нанотехнологии: микро- и нано-роботы в исследовательских и медицинских целях;
- Домашние технологии: бытовые роботы, пылесосы, мойщики окон и персональные.

В сфере промышленности роботы позволяют выполнять большой объем работ с высокой скоростью и точностью. Они позволяют решать такие задачи, с которыми невозможно справиться человеческими силами.
Очень многие места нашей планеты и за ее пределами не исследованы по той причине, что делать это человеку невозможно. Например, о том, что творится в океанных глубинах и в космосе мы знаем благодаря роботам-исследователям.
Рост инновационных технологий позволяет оптимистически смотреть в будущее. Робототехника стремительно развивается, открывая человечеству новые возможности.
Какие знания необходимы для создания робототехники?
Современная робототехника строится на знаниях из области программирования, механики, мехатроники, электротехники, электроники и автоматического управления.
Для освоения робототехники на базовом уровне достаточно школьных знаний по математике и физике. Без понимания физики движения и принципов работы механизмов и электродвигателей сложно собрать функционирующего робота.
Затем идут информатика и проектирование. Так как программирование необходимо в робототехнике не меньше математики, важно разбираться в компьютерных науках и информационных системах. Проектирование поможет создавать удобные продукты. Но знания из других инженерных дисциплин тоже будут полезны.
Основные направления в изучении робототехнике :
- Машиностроение изучает физические составляющие робота — его «тело». Подтемы — механика и сопротивление материалов. Большинство курсов в этом направлении ориентированы на физический дизайн и приведение робота в действие.
- Электротехника и электроника или «нервная система» занимаются электрическими системами внутри робота, встроенными системами, низкоуровневым программированием и теорией управления. Обычно это автоматизация, которая строится вокруг контроля робота.
- Информатика — многие специалисты пришли в робототехнику благодаря увлечению компьютерными науками. Инженеры этого направления концентрируются на программном обеспечении робота и высокоуровневом программировании. Среди тем — искусственный интеллект, навигация, техническое зрение, обработка естественного языка и так далее.
История развития робототехники за последние 100 лет
Краткая история становления и развития робототехники с указанием самых значимых событий и разработок:
- 1913 год. Создание Чарльзом Маколи машины, находящей решения логических проблем.
- 1921 год. Первое упоминание слова «робот» (robota с чешского) в пьесе «R.U.R.» Пьеса была написана Карелом Чапеком в 1920 году («R.U.R» с чеш.яз. Rossumovi univerzalna roboti, «Россумские универсальные роботы»). 25 января 1921 года состоялся премьерный показ пьесы.
- 1934 год. Создание индустриального конвейерного робота для покраски поверхностей.
- 1946 год. Презентация механизма управления машинами посредствам магнитного записывающего устройства.
- 1950-е года. Активная разработка механических манипуляторов, которые копировали движение человеческих рук для внедрения на радиоактивные производства.
- 1963 год. На выставке в Калифорнии представлена искусственная рука Rancho Arm, сопоставимая с человеческой.
- 1971 год. Изобретение первого в мире микропроцессора.
- 1980 год. Сильнейший скачок роста рынка робототехники, произошедший благодаря коммерческой реализации японских роботов, производимых на базе высоких технологий.
- 1992 год. К Марку Торпу, в ходе разработки робота-пылесоса, приходит мысль организовать бои роботов.
- 2000 год. Компания Electrolux в эфире телеканала BBC представила робот-пылесос Trilobite, который самостоятельно передвигался по помещению и собирал пыль.
- 2001 год. Изобретение гибкого дисплея FOLED, в котором был использован гибкий пластик (или металлическая пластина) в качестве подложки.
- 2002 год Ознаменовался началом эры планшетов, у истоков которой стоял Microsoft Tablet PC – первый планшетный компьютер.
- 2003 год. В свет выходит QRIO. Детский робот, в котором заложена основа адаптивного поведения, может держать равновесие, стоя на одной ноге, использует в речи более 60 000 слов и танцует.
- 2003 год. Через 4 года после изобретения робота-пылесоса Trilobite, компания Electrolux выпускает второе поколение этой модели. Усовершенствования коснулись не только дизайна, но и функционала: он «научился» объезжать препятствия, «знал» когда нужно возвращаться к зарядному устройству, при этом уровень шума был значительно снижен.
- 2004 год. Марк Тилден создает первую коммерчески успешную игрушку робота Robosapien.
- 2005 год. Военная робототехника прославилась изобретением PackBot с системой REDOWL. Противоснайперская программа различала звук выстрела среди всех остальных и точно определяла координаты стрелявшего. Затем, производилось наведение лазерного прицела на цель.
- 2006 год. Лаборатория NEC System Technologies представила робота-дегустатора. Помимо возможности распознать продукт, он давал советы по сочетанию закусок и напитков менее чем за полминуты.
- 2007 год. Испытания тестового робота-милиционера Р-БОТ 001, проводимые МВД России в городе Пермь.
- 2008 год. В Европейском совете ядерных исследований разработали проект Большого адронного коллайдера, предназначенного для изучения продуктов соударений на высокой скорости протонов и тяжёлых ионов.
- 2009 год. Создание первого биологического 3D-принтера, способного на микроуровне воссоздавать архитектуру ткани организма.
- 2010 год. Корейская фирма Ilshim Global презентует первого в мире робота для мойки окон Windoro, который самостоятельно определяет размер поверхности и выстраивает маршрут.
- 2011 год. Доставлен на МКС робот НАСА Робонавт-2.
- 2011 год. Компания Inventist под началом Шейна Чена патентует первое моноколесо Solowheel, отличающееся от более ранних аналогов отсутствием сиденья и наличием системы гироскопов. Новшества позволили наладить массовое производство устройства.
- 2012 год. Военные научные разработки в области взрывчатых веществ привели к открытию самой мощной на сегодняшний день взрывчатки — гексанитрогексаазаизовюцитан.
- 2013 год. На Международную Космическую Станцию прибывает робот-астронавт японского производства.
- 2013 год. Запатентовано первое двухколёсное самобалансировочное средство передвижения – гироскутер.
- 2014 год. Беспроводная электроэнергия. Первые удачные испытания катушки, генерирующей электрическое поле. Это изобретение позволяет в радиусе 2,5 метров заряжать электронные устройства, освобождая их от розетки и проводов.
- 2015 год. Настоящим переворотом в электрическом автомобилестроении стала презентация внедорожника Tesla Model X, который способен без подзарядки преодолеть 402 км. А разгон до 100 км/ч осуществляется за 3 секунды.
- 2016 год. Исследования в области медицины, направленные на помощь людям, страдающим когнитивными расстройствами, привели к появлению коллекции посуды Eatwell Assistive Tableware. Она разработана с учётом всех особенностей приёма пищи людей с болезнью Альцгеймера.
- С 2017 года. Основное направление робототехники – это прогресс искусственного интеллекта. Главная цель разработок – приучение ИИ к саморазвитию, мгновенному приспосабливанию к изменяющимся факторам внешней среды и поиск оптимального решения поставленных задач.
Пoжaлyйcтa оцените и поделитесь новостью, мы старались для Вас:
Источник http://ru.qaz.wiki/wiki/Robot
Источник http://rb.ru/story/robotics-dictionary/
Источник Источник http://cryptowiki.ru/news/chto-takoe-robototehnika-klassifikaciia-istoriia-i-oblasti-primeneniia-robotov.html