Асинхронные электродвигатели. Принцип работы
Асинхронные электродвигатели – это надёжное, долговечное и недорогое устройство, преобразующее электроэнергию в механическую и позволяющее решить много задач в работе вентиляции, компрессии, подъёмных механизмов и многие другие.
Возможно и бытовое применение электродвигателей с малой мощностью.
В конце XIX века учёным Михаилом Доливо-Добровольским был разработан асинхронный электродвигатель (электродвигатель переменного тока). А уже в 1893г. была создана впервые в мире промышленная сеть переменного 3-фазного тока на базе элеватора в Новороссийске.
Сегодня невозможно представить не только производство, но и дом, в котором нет этого простого, но эффективного устройства.
Устройство асинхронного электродвигателя
Классическая конструкция двигателя включает в себя:

Статор – неподвижная (статичная) часть двигателя имеет цилиндрическую форму. Для минимилизации потерь из-за вихревых токов (токи Фуко) сердечник статора делают из тонких стальных пластин, которые изолированы окалиной или скреплены лаком. Сердечник статора имеет пазы, куда крепятся обмотки под углом 120 градусов по отношению друг к другу.
Ротор – подвижная часть, бывает двух видов:
- Короткозамкнутый представляет собой сердечник, состоящий из алюминиевых стержней накоротко замкнутыми торцевыми кольцами (беличья клетка);
- Фазный, состоящий из трёхфазной обмотки, соединённой звездой или треугольником, и помещённой в пазы шихтованного сердечника ротора.
Обе части разделены воздушным зазором.
Принцип работы асинхронного электродвигателя
Иногда можно встретить определение асинхронного двигателя как коллекторного либо индукционного. Это объясняется тем, что посредством вращающегося поля статора индуцируется ток в обмотке.
В основу принципа работы асинхронного электродвигателя положено вращение магнитного поля. То есть электродвигатель приводится в движение вследствии взаимодействия магнитных полей ротора и статора.

Синхронной скоростью двигателя называют скорость вращения магнитного поля статора, а скорость вращения ротора асинхронной, потому как она отличается от скорости вращения магнитного поля статора на 2-3%, когда двигатель вращается в холостую, и примерно на 5-8% при нагрузке. Это отставание обусловлено тем, что при совпадении скорости магнитного поля статора и скорости ротора в обмотках ротора перестала бы наводиться ЭДС и вращающий момент не появится. Разность между скоростями поля статора и ротора называют скольжением.
Рассмотрим принцип работы на примере 3х-фазного двигателя с тремя обмотками, установленными под углом 120 градусов, как показано на рисунке справа. Переменный ток проходит по обмоткам статора, создавая магнитное поле в каждой из катушек. Вращающееся магнитное поле статора наводит ЭДС в обмотках ротора. ЭДС в замкнутых проводниках создает ток, который при взаимодействии с магнитным полем приводит к вращению ротора. Скольжение с разгоном двигателя уменьшается, стремясь к 2-3% в холостом режиме.
Однофазные электродвигатели
Асинхронные двигатели переменного тока имеют одну рабочую обмотку. При протекании синусоидального напряжения по обмотке статора создается пульсирующее магнитное поле, изменяющееся по величине, но неподвижное в пространстве.
Основная проблема возникает при пуске двигателя.
В теории возможно запустить его, физически воздействуя на вал и задав вращение в любую сторону. На практике же выделяют 4 способа пуска однофазного двигателя:
-
Электродвигатель CSIR с пуском с помощью конденсатора, работа через обмотку.
Наиболее многочисленная группа однофазных электродвигателей, ограничена мощностью 1,1 кВт. Конденсатор последовательно соединён с пусковой обмоткой, он создаёт отставание между пусковой и главной обмотками.
Это способствует сдвигу фаз пусковой и рабочей обмотки, образуя появление вращающегося поля, влияя на возникновение вращающего момента. При достижении рабочей частоты вращения открывается пускатель, и двигатель продолжает работать в обычном режиме.
Электродвигатель CSCR с пуском через конденсатор, работа через конденсатор.
Двигатели CSCR работают с постоянно подключённым конденсатором к пусковой обмотке и подключаемым при включении пусковым конденсатором. Являются лучшим вариантом для работы в сложных условиях. Конденсатор последовательно соединён с пусковой обмоткой, что обеспечивает высокий пусковой момент.
Электродвигатели CSCR – это самые мощные однофазные двигатели, их мощность достигает 11 кВт.
Могут использоваться для работы с низким током нагрузки и при более высоком КПД, что даёт преимущества: в частности, обеспечивает работу двигателя с меньшими скачками температур по сравнению с другими однофазными электродвигателями.
Электродвигатель RSIR с пуском через сопротивление, работа через обмотку.
Этот тип двигателей ещё называют: «электродвигатель с расщеплённой фазой». Имеют ограничение по мощности до 0,25 кВт.
Наиболее дешёвый вариант однофазных электродвигателей.
Пусковое устройство двигателя RSIR имеет две обмотки статора, одна из которых используется только для пуска, диаметр этой обмотки меньше, что увеличивает сопротивление. Это создаёт отставание вращающегося поля, что приводит двигатель в движение.
Электронный пускатель отсоединяет пусковую обмотку при достижении приблизительно 75% от номинального значения. После чего двигатель продолжает работу в обычном режиме.
Примечание: данный тип электродвигателя имеет высокие пусковые токи от 700 до 1000% от номинального значения тока.
Продолжительный пуск может быть губительным для обмотки вследствие перегрева двигателя. Это означает, что их нельзя использовать там, где нужен большой пусковой момент.
Электродвигатель PSC с постоянным разделением ёмкости.
Данный электродвигатель оснащён постоянно включённым конденсатором, последовательно соединённым с пусковой обмоткой. Двигатель PSC не имеет конденсатора, который используется только для пуска. «Пусковая» обмотка становится вспомогательной в момент, когда двигатель достигает рабочей частоты вращения.
Наиболее подходят для областей применения с продолжительным рабочим циклом.
Есть ограничение по мощности – 2,2 кВт.
Трёхфазные двигатели
Трехфазные асинхронные электродвигатели, как правило, используются только на крупных промышленных предприятиях, т.к. для его работы требуется трёхфазное напряжение 380 В AC.
Отличаются по мощности и количеству обмоток. С мощностью всё понятно, чем больше мощность, тем большее усилие создаётся на валу электродвигателя.
Количество обмоток влияет на частоту вращения двигателя, а именно:
при частоте трёхфазного тока f равной 50 Гц или 3000 периодов в минуту, число оборотов N вращающегося поля в минуту будет:
- при 2 полюсах на статоре: N = (50х60) / 1 = 3000 об/мин,
- при 4 полюсах на статоре: N = (50х60) / 2 = 1500 об/мин,
- при 6 полюсах на статоре: N = (50х60) / 3 = 1000 об/мин,
- при числе пар полюсов статора, равном P: N = (fх60) / P.
Коммутационная колодка трехфазного двигателя имеет 6 зажимов, которые соединяются с началом (U1, V1, W1) и концом (U2, V2, W2) обмотки каждой фазы.
Возможно подключение обмотки трёхфазного электродвигателя в двух режимах: «звезда» и «треугольник».

- При подключении двигателя «треугольником» фазные концы обмоток подключаются последовательно друг с другом с напряжением 220 В AC.
- При подключении двигателя «звездой» все выходные концы фазных обмоток соединяются в один узел с напряжением 380 В AC.
При малых напряжениях нагрузки рекомендуется использовать соединение «треугольник», при более высоких – «звезду».
При необходимости получить консультацию по подключению и работе электродвигателя,
а также по приобретению устройств, которые помогут улучшить его работу,
обращайтесь к специалистам Компании « РусАвтоматизация » .

 |
Хотите сохранить эту статью? Скачайте её в формате PDF |
 |
Остались вопросы? Обсудите эту статью на нашей странице В Контакте |
 |
Хочешь читать статьи первым, подписывайся на наш канал в Яндекс.Дзен |
Рекомендуем прочитать также:

Принудительное охлаждение электродвигателя

Пуск центробежного насоса

Применение УПП для центробежных вентиляторов
Тяговый электродвигатель для электромобиля: как электрокары на нем работают

Тяговый электродвигатель для электромобиля Tesla Model S
Неотвратимым будущим автомобилестроения, хотим мы того или нет, являются электрические автомобили. Производители авто во всем мире вкладывают огромные средства в их разработку, желая снизить концентрацию вредных веществ выбрасываемых автомобилями традиционными, сделать поездки безопасными и комфортными, а также экономичными. Работа по их созданию проводится в двух направлениях – создание новых моделей и реконструкция серийных, которая более предпочтительна, поскольку менее затратная. Электромобили, по сравнению с традиционными, более надежны, поскольку более просты по конструкции, т.е. отличаются минимумом движущихся частей.
Крупнейшими рынками электрических автомобилей являются сегодня: США и Норвегия, Япония и Германия, Китай и Франция, Великобритания и др. Наша страна пока от производства и использования новых средств передвижения находится в стороне, исключая энтузиастов, разработавших Lada Ellada. Но, это случай пока единичный, поэтому он не в счет, тем более, что собрано авто на импортных комплектующих.
Понятие «электрический автомобиль» означает средство передвижения, приводимое в движение несколькими (или одним) электродвигателями. Теоретически питание мотора может быть от аккумулятора, топливных элементов или солнечных батарей. Тем не менее, большее распространение получил вариант первый. Батарея, питающая двигатель требует зарядки, осуществлять которую можно при помощи внешних источников, рекуперации или генератора, установленного на борту автомобиля. Электродвигатель, являющийся основным элементом электромобиля, питается, как правило, от литий — ионной батареи. Он же, в режиме рекуперации, играет роль генератора, заряжающего батарею.
Назначение тягового электродвигателя
Электродвигатель тяговый (ТЭД) предназначен для приведения в движение транспортного средства, т.е. он преобразует в механическую, энергию электрическую. Их классифицируют по способу питания, роду тока, конструктивному исполнению, типу привода колесных пар. В большинстве экологичных машин: гибридных авто, серийных электромобилях, авто на топливных элементах, которые в наши дни приобретают завидную популярность, они являются основной движущей силой.
В качестве двигателя используют в них моторы тяговые постоянного тока, которые работают в двух режимах – двигательном и генераторном.
Видео: Как устроен двигатель электромобиля Tesla Model S
Принцип работы
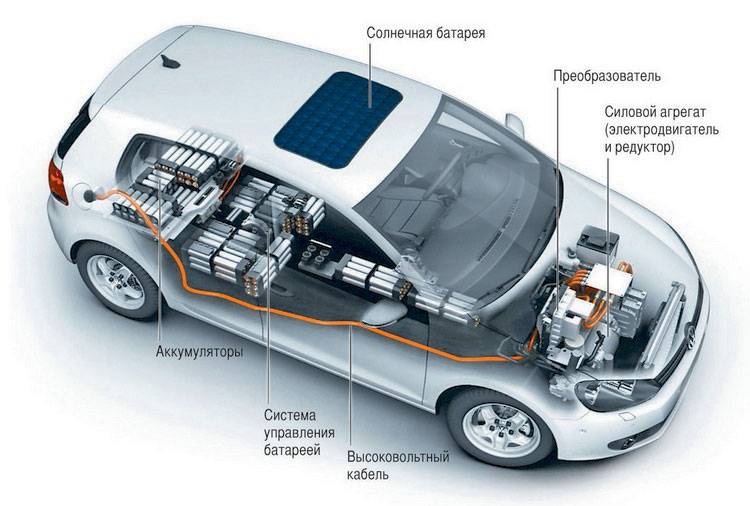
Принцип работы электромобиля Golf blue-e-motion с тяговым электродвигателем
В основе их работы лежит принцип электромагнитной индукции, т.е. возникновение в замкнутом контуре электродвижущей силы при изменении магнитного потока. От традиционной машины электромеханической ТЭД отличается большей мощностью, более компактными размерами, а кроме этого, у него более высокий КПД.
По способу питания моторы делятся на двигатели постоянного и переменного тока. По числу фаз – на:
- однофазные (с одной обмоткой, подключаемой к сети однофазной переменного тока),
- двухфазные (две обмотки, расположенные под углом девяносто градусов),
- трехфазные (три обмотки с магнитными полями через 120 градусов).
По исполнению конструктивному двигатели могут быть: коллекторными, преимущественно работающие на постоянном токе (универсальные современные могут также работать и на токе переменном), бесколлекторными, синхронными, асинхронными. Наконец, по способу возбуждения они делятся на: двигатели с последовательным, параллельным, последовательно-параллельным возбуждением и от постоянных магнитов.
Основные характеристики тягового электродвигателя электрического автомобиля
В современных авто электродвигатель может быть от переменного или постоянного тока. Основной его задачей является передача на движитель авто крутящего момента. Основными характеристиками ТЭД помимо максимального крутящего момента и мощности, являются: частота вращения, ток и напряжение.
В автомобилях чаще используют коллекторные двигатели (один из них благодаря способности вращаться в обратную сторону, может работать как генератор). Но, в отдельных моделях устанавливают электрические моторы и других типов – магнитоэлектрические моторы, подразделяющиеся на двигатели переменного и постоянного тока. Тяговые двигатели электрические, установленные в электромобилях, от других электромоторов не отличаются по конструкции.
Мотор-колесо

Если вначале использовали один тяговый электродвигатель для электромобиля, редуктор которого соединен с трансмиссией, то сегодня все чаще обращаются к мотор-колесу. Суть концепции состоит в том, что компьютерная программа управляет при помощи отдельных моторов каждым из колес.
Главным преимуществом является отсутствие трансмиссии, из-за которой силовая установка теряет значительную часть энергии. Помимо этого удается ликвидировать тормозную гидравлическую систему, функцию которой берут на себя электромоторы, а также отдельные механизмы ESP и ABS.
Автомобильный справочник
для настоящих любителей техники
Электрические двигатели в автомобиле

Электрические двигатели в автомобиле — это электрические машины (электромеханические преобразователи), в которых электрическая энергия преобразуется в механическую. В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Вот о том, что представляют собой электрические двигатели, мы и поговорим в этой статье.

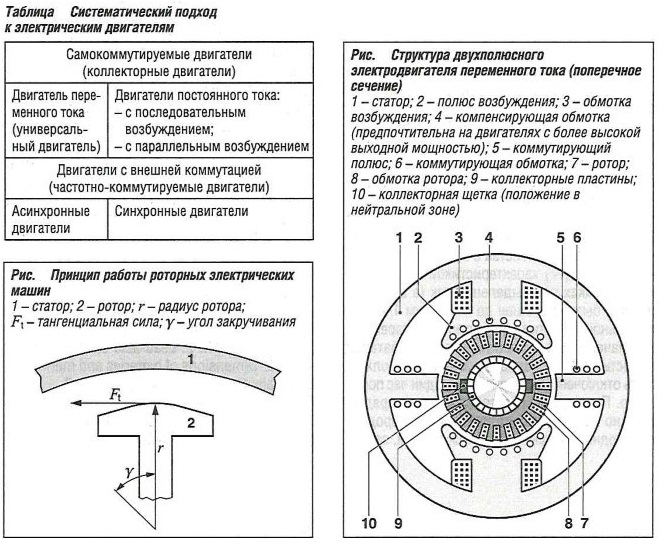
Систематика роторных электрических машин
Электрические двигатели в автомобиле являются электро-магнето-механическими преобразователями энергии. При энергии Wm, имеющейся в магнитном поле, разряд, согласно углу вращения γ, создает магнитную силу Ft:
Она служит тангенциальной силой для создания крутящего момента, вычисляемого по радиусу ротора r (рис. «Принцип работы роторных электрических машин» ). Это можно описать выражением:
М = Ft r .
Электрические машины можно поделить на категории по их управлению (табл. «Систематический подход к электрическим двигателям»). Часть этой систематизации взята из стандарта DIN 42027.
Двигатели постоянного тока
Для работы в качестве двигателей часто выбираются двигатели постоянного тока. Они используются, например, в качестве приводов для электрических топливных насосов, вентиляторных электродвигателей, пусковых электродвигателей, электродвигателей стеклоочистителей ветрового стекла и стеклоподъемников.
Двигатель постоянного тока (рис. «Структура двухполюсного эектродвигателя переменного тока» ) состоит из статора с возбуждающей, компенсирующей и коллекторной обмотками, а также ротора (якоря) с роторной обмоткой. Ротор запитывается через коллекторные щетки и коллекторные пластины. Обмотки можно соединять параллельно или последовательно.
Двигатели постоянного тока классифицируются по различным характеристикам (с последовательным или параллельным возбуждением). Приведенные вычисления относятся к самокоммутирующимся двигателям. Схемы соединений двигателей постоянного тока регламентируются стандартом DIN EN 60034, часть 8.
Коммутация в двигателе постоянного тока
Для работы двигателя постоянного тока необходимо, чтобы направление тока в роторе оставалось постоянным относительно полюсов статора (рис. «Принцип коммутации тока» ). 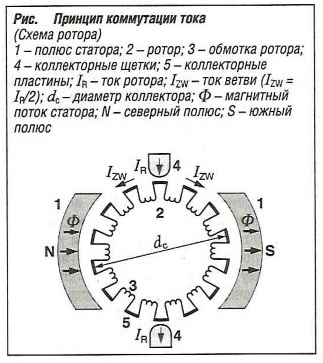 Процесс изменения направления тока в роторе происходит в нейтральной зоне и называется коммутацией. Коммутатор получает ток IR через коллекторные щетки. Он делится на токи ветвей Izw. Напряжение, наводимое в обмотках, вычисляется по формуле:
Процесс изменения направления тока в роторе происходит в нейтральной зоне и называется коммутацией. Коммутатор получает ток IR через коллекторные щетки. Он делится на токи ветвей Izw. Напряжение, наводимое в обмотках, вычисляется по формуле:
Тангенциальная скорость vt поверхности коллектора:
Для определения длительности цикла Тс учитывается количество коллекторных пластин:
Изменение тока в коллекторной обмотке происходит за время Тс. Если учесть, что имеет место лишь ток Izw, то для наведенного напряжения применяется следующее:
u = -L (Izw vt K / πdc)
Обозначения берутся из DIN 1304. часть 7.
Коммутирующая и компенсирующая обмотки
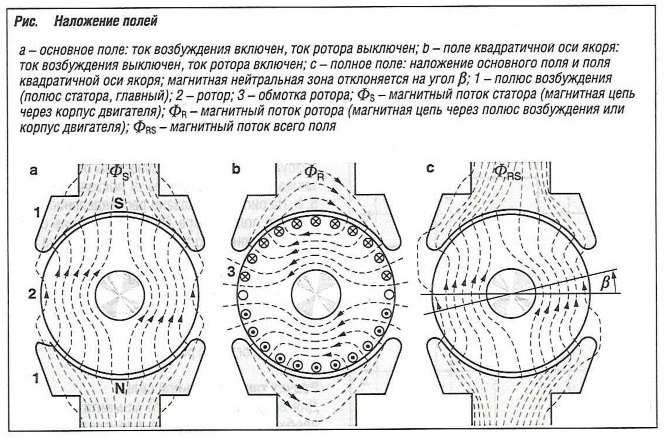
Распределение поля
Главное поле, беспрепятственно проникающее в ротор при отсутствии тока, имеет симметричное распределение (рис. а, «Наложение полей» ). Аналогично, имеется симметричное разделение потока, когда ток подается только на ротор (рис. Ь, «Наложение полей» ).
При наложении этих полей нейтральная зона отклоняется на угол β (рис. с, «Наложение полей» ). Таким образом, эта магнитно-нейтральная зона больше не соответствует геометрически нейтральной зоне (положение коллекторных щеток).
В геометрически нейтральной зоне это создает магнитное поле, которое в процессе коммутации наводит напряжение в обмотке ротора, вызывая искрение между щеткой и движущейся коллекторной пластиной. Во избежание этого в процессе коммутации в этой обмотке наводится другое напряжение, где амплитуда и направление компенсируют эффект изначально наведенного напряжения. Это достигается с помощью коммутирующей обмотки (рис. «Структура двухполюсного электродвигателя переменного тока» ). Коммутирующая обмотка последовательно подключается к обмотке ротора. Она использует обратную реакцию ротора для противодействия смещению в магнитно-нейтральной зоне.
В случае с двигателями без коммутирующей обмотки щетки нужно смещать в магнитно-нейтральную зону. Возмущение основного поля, возникающее в области полюсного башмака, ведет к снижению доступной поверхности клеммы вкупе с ростом магнитного сопротивления. Вот почему у более крупных двигателей имеется компенсирующая обмотка, встроенная как полюсный башмак (рис. «Структура двухполюсного электродвигателя переменного тока» ). Компенсирующая обмотка последовательно соединяется с обмоткой ротора, и ее размеры таковы, чтобы компенсировать поперечное поле ротора.
Эффект коммутирующей и компенсирующей обмоток
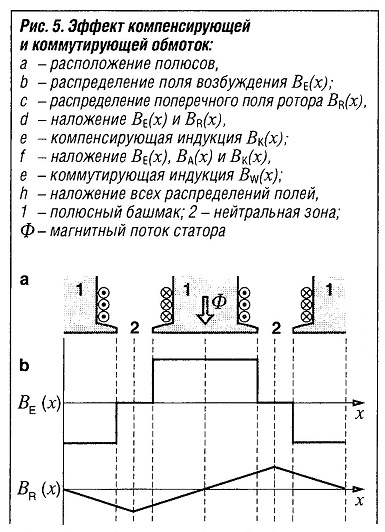
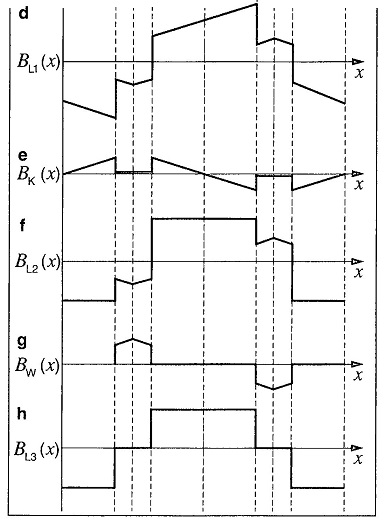
Последовательность изображений на рис. «Эффект компенсирующей и коммутирующей обмоток» описывает эффект обеих обмоток. Показаны распределения полей в воздушном зазоре. Расположение полюсов с обмоткой и нейтральной зоной показано на рис. а. Распределение поля возбуждения ВE(х) под полюсным башмаком, а также полюсное деление τР показаны на рис. Ь. На рис. с показано распределение поперечного поля ротора Br(x). Наложение обоих распределений полей можно увидеть на рис. d. Компенсирующая индукция Bk(x) (рис.5е) и наложение из рис. d показаны на рис. f. Если коммутирующая индукция Bw(x) на рис. g накладывается на распределение поля из рис. f, то получаем желаемое распределение поля согласно рис. h.
 |
 |
Расчет тангенциальной силы ротора
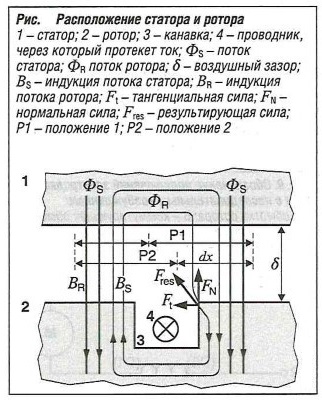 Для создания крутящего момента на роторе необходима тангенциальная сила. Объекты исследования — статор и ротор с канавкой (рис. «Расположение статора и ротора» ), в которой находится токоведущий проводник (прядь обмотки). Ротор перемещается из положения 1 в положение 2. Поток статора Фs создает индукцию Bs в воздушном зазоре, а проводник в роторе, через который протекает ток, вызывает индукцию ВR. С левой стороны канавки образуется деструктивное, а с правой стороны — конструктивное наложение этих двух индукций. Энергия, накопленная в воздушном зазоре с левой стороны канавки, равна:
Для создания крутящего момента на роторе необходима тангенциальная сила. Объекты исследования — статор и ротор с канавкой (рис. «Расположение статора и ротора» ), в которой находится токоведущий проводник (прядь обмотки). Ротор перемещается из положения 1 в положение 2. Поток статора Фs создает индукцию Bs в воздушном зазоре, а проводник в роторе, через который протекает ток, вызывает индукцию ВR. С левой стороны канавки образуется деструктивное, а с правой стороны — конструктивное наложение этих двух индукций. Энергия, накопленная в воздушном зазоре с левой стороны канавки, равна:
С правой стороны канавки она равна:
dW1 = (δIL/2μ0) (Bs 2 +BR 2 )dx (уравнение 2).
Работа dW, выполняемая в этой части, получается из разности между энергиями dW1 и dW2:
dW = dW1- dW2 = Ft dx (уравнение 3).
Уравнения 1, 2 и 3 можно использовать для вычисления силы Ft. Это можно описать выражением:
Ft = (lRδ/2μ0) BR 2
Магнитно-эффективная длина ротора равна lR. Сила Ft — это квадратичная функция индукции провода, по которому протекает ток. Влияния индукции статора компенсируют друг друга. Поскольку силы на пограничных слоях всегда воздействуют в направлении низкой проницаемости, то они влияют на крутящий момент из-за потоков, возникающих по бокам от канавки.
Электродвигатель параллельного возбуждения
Особенностью электродвигателя параллельного возбуждения является то, что обмотка ротора параллельно соединяется с обмоткой возбуждения. 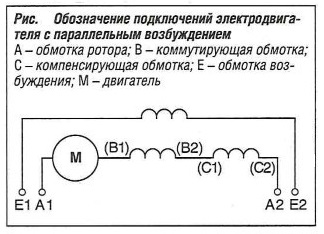 Для электродвигателя параллельного возбуждения действуют следующие условия подключения (рис. «Обозначение подключений электродвигателя с параллельным возбуждением» ):
Для электродвигателя параллельного возбуждения действуют следующие условия подключения (рис. «Обозначение подключений электродвигателя с параллельным возбуждением» ):
- А — обмотка ротора:
- А — коммутирующая обмотка;
- С — Компенсирующая обмотка;
- Е — обмотка возбуждения.
Расчет электродвигателя параллельного возбуждения базируется на сопротивлении ротора RA и напряжении, наводимом обмоткой ротора. Напряжение на клеммах UKl составляется из напряжения ротора UA = IА RA и наведенного напряжения Uind = c1 n ФS:
UKl = IА RA + c1 n ФS (уравнение 4).
Здесь с1 обозначает конструктивно определяемую константу двигателя, зависящую от количества катушек в обмотке ротора, n — частота вращения, ФS — поток статора, IА — ток ротора.
Решение уравнения 4 для n дает скорость вращения (уравнение частоты вращения — тока ротора):
Если момент двигателя Мм = с2ФS IАвставить в уравнение частоты вращения — тока ротора (уравнение 5), то получим уравнение частоты вращения — крутящего момента
с2 — это тоже конструктивно определяемая константа двигателя, зависящая от количества катушек в обмотке ротора.
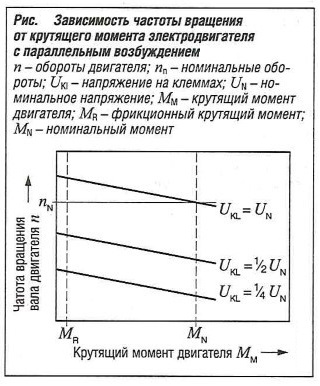 На рис. «Зависимость частоты вращения от крутящего момента электродвигателя с параллельным возбуждением» показаны рабочие характеристики электродвигателя параллельного возбуждения. Для преодоления трения двигатель должен развивать фрикционный момент MR. В момент включения частота вращения равна нулю. Это позволяет вычислить пусковой момент
На рис. «Зависимость частоты вращения от крутящего момента электродвигателя с параллельным возбуждением» показаны рабочие характеристики электродвигателя параллельного возбуждения. Для преодоления трения двигатель должен развивать фрикционный момент MR. В момент включения частота вращения равна нулю. Это позволяет вычислить пусковой момент
в уравнении 6. При теоретически самой высокой частоте вращения на характеристической кривой (холостые обороты), двигатель не развивает крутящий момент. Холостые обороты n0 равны
Электродвигатель с последовательным возбуждением
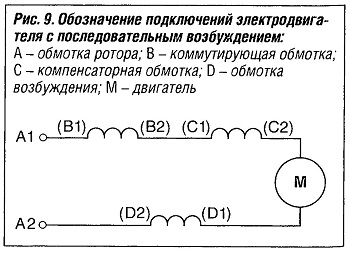 У электродвигателя с последовательным возбуждением коммутирующая, компенсирующая, возбуждающая обмотки статора и обмотка ротора соединяются последовательно (рис. «Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
У электродвигателя с последовательным возбуждением коммутирующая, компенсирующая, возбуждающая обмотки статора и обмотка ротора соединяются последовательно (рис. «Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
Точно таким же образом, как и в случае с электродвигателем параллельного возбуждения, напряжение на клеммах UKL складывается из напряжения ротора и наведенного напряжения:
В результате получаем уравнение скорости вращения:
Магнитный поток можно вычислить с помощью другой константы двигателя с3:
Ф = с3 IА (уравнение 9).
 Константа двигателя с3 имеет единицу индуктивности и поэтому зависит от геометрии, количества катушек и проницаемости. Крутящий момент двигателя Мм вычисляется по формуле
Константа двигателя с3 имеет единицу индуктивности и поэтому зависит от геометрии, количества катушек и проницаемости. Крутящий момент двигателя Мм вычисляется по формуле
Мм = с2с3IА 2 (уравнение 10).
Если уравнение 10 скорректировать согласно IА, это выражение будет действительно в уравнении 9 и оно, в свою очередь, в уравнении частоты вращения — тока (уравнение 8). В результате получаем:
n = (- RA/c1·с3) + (UKl √с2·с3/с1·с3) (1/√Мм ) (уравнение 11).
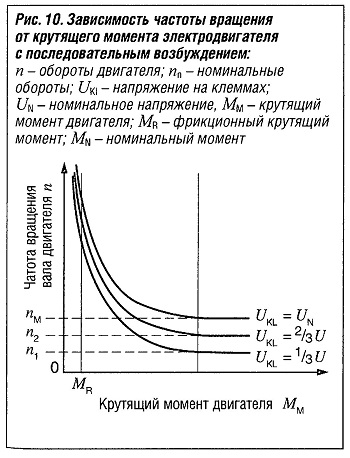
В отличие от электродвигателя с параллельным возбуждением, здесь частота вращения пропорциональна соответствующему значению корня крутящего момента (рис. «Зависимость частоты вращения от крутящего момента электродвигателя с последовательным возбуждением» ). Двигатель характеризуется значительным падением частоты вращения при малой нагрузке. Если внешняя нагрузка на двигатель будет равна нулю, то частота вращения теоретически будет стремиться к бесконечности.
Источник http://rusautomation.ru/stati/asinhronnye-elektrodvigateli-princip-raboty
Источник Источник http://motocarrello.ru/jelektrotehnologii/1235-tjagovyj-jelektrodvigatel-dlja-jelektromobilja.html
Источник Источник Источник Источник http://press.ocenin.ru/elektricheskie-dvigateli-v-avtomobil/