RC Машинки: Первые покупки — шасси и силовая установка
Силовая установка — звучит как-то странно, но если подумать, то очень четко описывает те самые компоненты которые заставляют модель двигаться. Не уверен входит ли сюда сервопривод (лево/право). Если вы читали первую часть этого цикла, то вы знаете, что есть модели на ДВС и на электромоторах. Так как по большей части я описываю свой опыт — речь пойдет об электромоторах и комплектующих под них.
Написать методичку по электромоторам и регуляторам дело скучное и занудное. Я добавлю полезных ссылок в конце, для более любознательных. В этой статье мы рассмотрим тот МАКСИМУМ, который вам необходимо знать, как для человека который хочет веселиться + не упасть лицом в грязь, в холиварах на районе. Я постараюсь написать, о том, что действительно важно и чем руководствовался сам.
Как типичный программист я пошел путем сложным, пытаясь понять как все оно работает и пытаться найти лучшее. Но на деле нельзя вот просто взять рассчитать и спланировать все заранее.

Вы наверняка наблюдали за запусками ракет которые в последний момент отменяли. Цена ошибки высока и на испытание требуется время и подготовка. Я не знаю, почему меня это прикалывает, но вот как-то так. С реальными хобби, если вы купили, что-то не то или что-то сломали, не получится просто скачать другую программу или библиотеку решив проблему. Доставку новых запчастей придется ждать дни или даже недели.
Узнать что необходимо подкрутить или затюнить возможно только тогда, когда вы выберетесь на трек. Хорошо если это будет раз в неделю. Поэтому меньше читайте и слушайте экспертов. Лучше пробуйте. Математика тут непростая и на такие вопросы как «А не перегреется ли мой мотор через пару кругов?» вы попросту устанете отвечать. Проще проехать и замерить 
Строение RC машинки
Прежде чем идти в магазин, логично разобраться в том, из чего состоят эти машинки. С этим особых трудностей у меня не возникло. Комплектующих не так много.
- Шасси
- Электромотор
- ESC (управляет электромотором)
- Сервопривод
- Аккумулятор
- Аппаратура (для управления)
С машинками, как и с компьютерами, выбор огромный. В первой статье мы рассмотрели разные классы машинок. Их можно приобрести готовыми, наполовину готовыми или же просто необходимым набором комплектующих. Если вам интересны готовые, то я не понимаю, что вы тут делаете?

Готовые бывают с пометкой RTR — Ready to run, то есть готовые к покатушкам. Такие комплекты идут даже с аппаратурой из коробки.Понятное дело, такие модели больше подойдут либо тем, кто в данный момент вообще не хочет разбираться, либо в подарок.
ARR — Almost Ready to Run, то есть почти готовые к покатушкам. Как правило это шасси с мотором, ESC регулятором и сервоприводом. Вам нужно докупить аппаратуру, аккумулятор, зарядник.
А так же есть Kit версия. Это просто шасси. Корпус так сказать. Может быть в собранном виде, а может и в разобранном. Я бы, наверное, порекомендовал брать собранные. Если вы новичок, перебрать ее успеете. Хотя, если вы автовладелец, думаю необходимые навыки у вас уже есть
Шасси

Под шасси подразумевают то к чему все крепится — подвеска, колеса etc. Продаются как в собранном виде так и разобранном. Уверен можно собрать вообще все по деталькам. С непривычки разобраться довольно сложно. Амортизаторы, трансмиссия, всякие дифференциалы, кулаки и много того, чему я даже не знаю точного названия.
Выбор шасси в большей степени обусловлен классом модели который вы хотите, масштабом и запасом прочности.

(под ДВС может немного отличаться креплениями, корпусом)
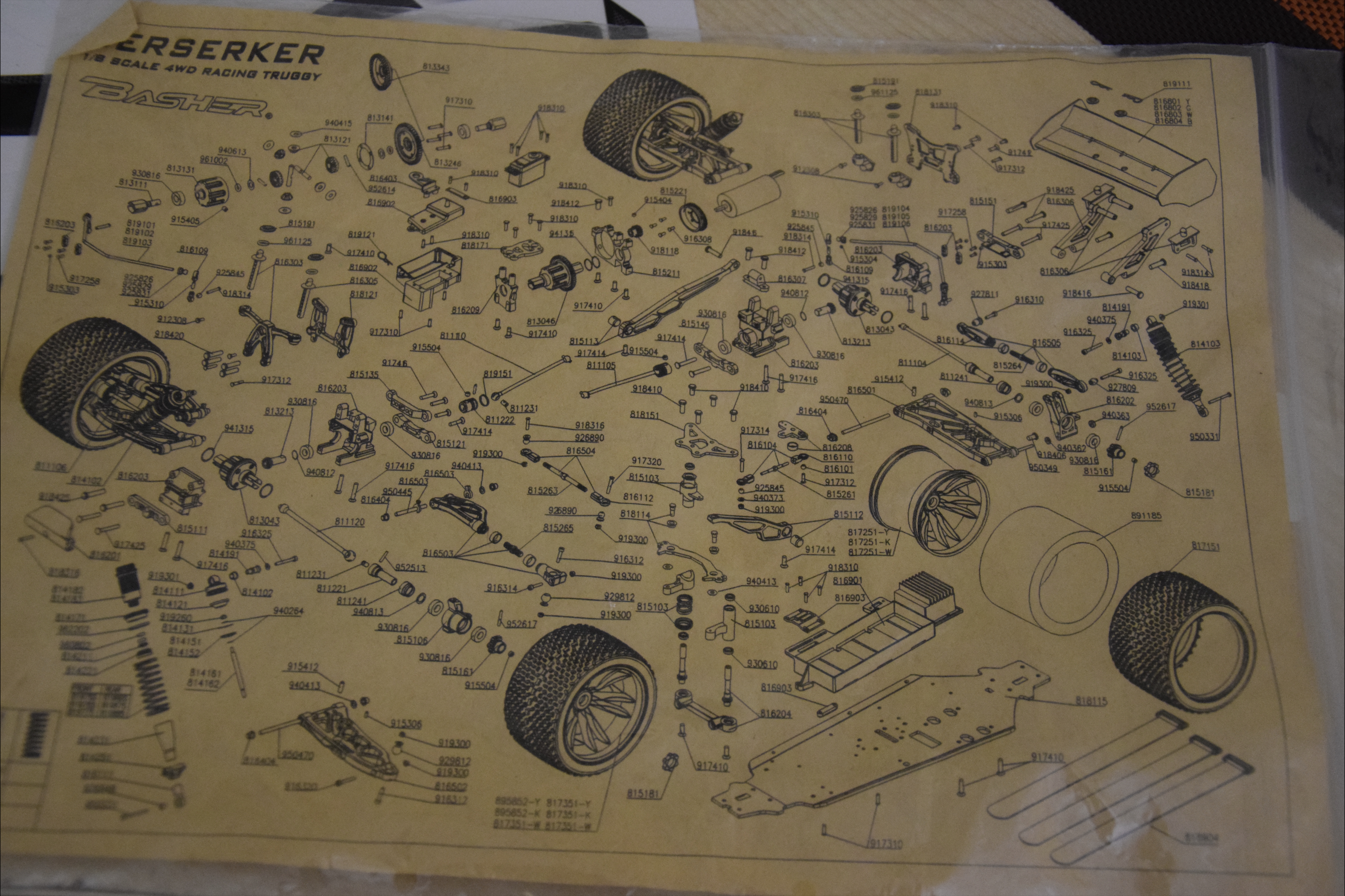
Я такой человек, что любит в первую очередь глазами, и поэтому увидев свое шасси, офигел от того насколько все прикольно и круто выглядит. Особо долго не думая, решил, что буду брать именно эту модель. У меня BSR Berserker 1/8 Truggy Kit.

В инcтаграммах есть разные аккаунты на тему RC. Если вы любитель эстетики, то там можно насмотреться всякой красоты на эту тему. Например хештег #rccars.
При выборе стоит обращать внимание на материалы. Чем они дешевле, тем чаще вам придется закупаться расходными деталями. Я не экстремальный гонщик и ничего из деталей шасси на замену еще не покупал, но судя по наличию расходников в продаже и видео в интернете как ломаются машинки — об этом стоит думать.
Чем больше пластмассы в шасси тем оно считается дешевле и хрупче. Но это не означает, что оно целиком должно быть из карбона или алюминия, хотя такое бывает
Как правило материалы миксуют, что обусловлено стремлением к адекватному весу и тем, что не всегда металл лучше. Например, основа и «бабочки» (то, к чему крепятся рычаги подвески и амортизаторы) — алюминий, рычаги подвески — «крепкая пластмасса», а прочие мелкие некритичные крепления — пластмасса «попроще».

(Сюда крепятся колеса у моего шасси)

Задняя бабочка металлическая, к ней крепятся амортизаторы, рычаги подвески, спойлер. Ниже крепится дифференциал (пластик). Клиренс модели регулируется установкой амортизаторов на различные отверстия на бабочке, рычагах подвески, а также заменой самих амортизаторов.
На фото также видно стабилизатор поперечной устойчивости. Изначально шасси было без него, но он шел в комплекте. После первого дня покатушек, понял, что машинка частенько переворачивается на поворотах и все-таки решил поставить стабилизацию. Радости как у настоящего механика Похоже Lego в детстве мне не хватило.
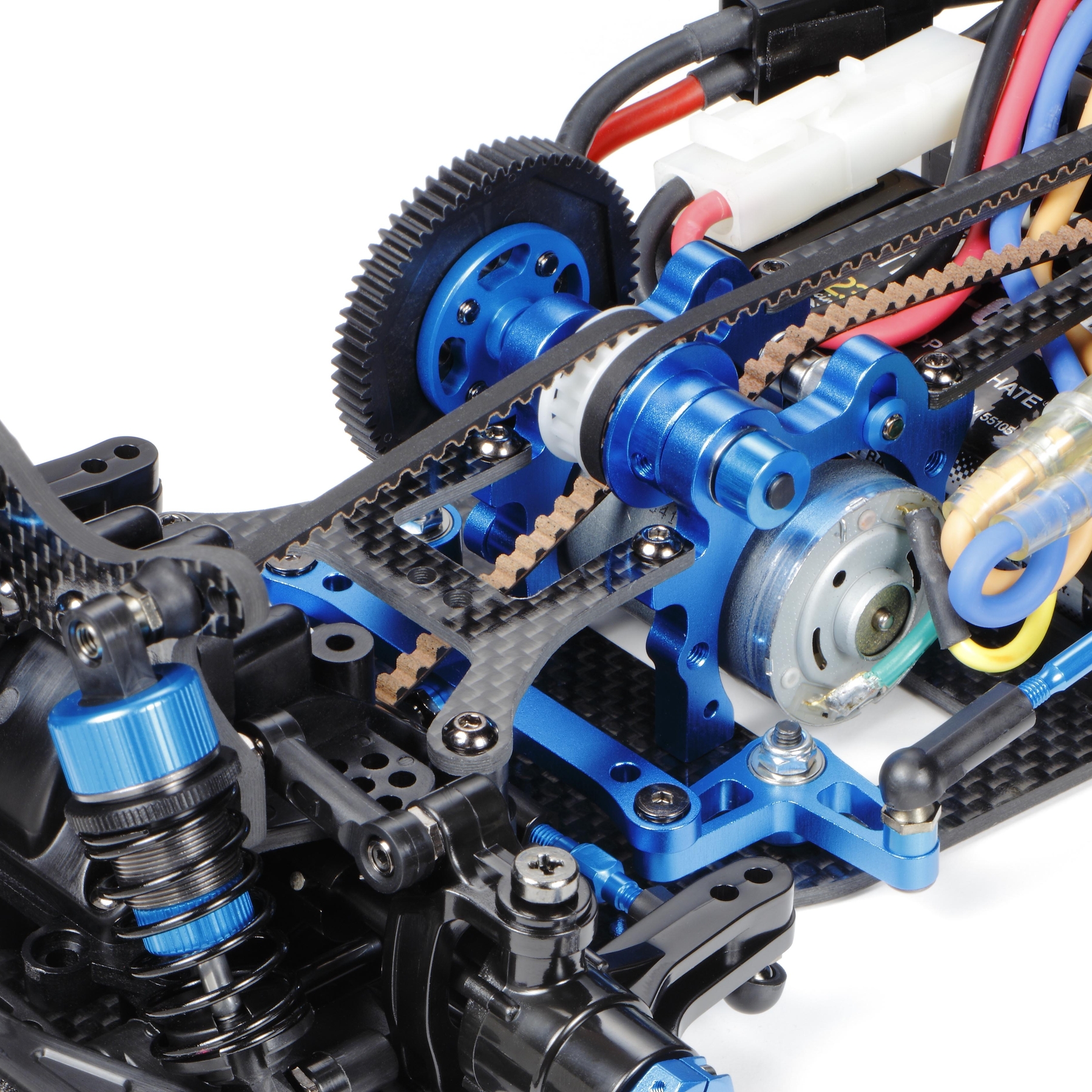
У шасси, как и настоящих машин, бывает разная трансмиссия. Полный/неполный привод. Например у моей модели привод полный и аж 3 дифференциала. Передний, задний и по центру который ближе всех к мотору, для согласования задних и передних колес. Дифференциалы соединены валами:
Бывает и ремнями:
Дифференциалы заливаются специальной жидкостью. Эта жидкость бывает различной вязкости. Причем если как у меня 3 дифференциала, то в каждый из них может пойти своя вязкость в зависимости от ваших потребностей (честно, я катаю с тем, что пришло с завода и понятия не имею на что оно влияет, вероятно на управляемость в повороте).
Из интересных особенностей строения — бывают горизонтальные амортизаторы:
В общем, как вы понимаете, поле для тюнинга и настроек шасси безграничное. Но в первую очередь, оно зависит от трека на котором вы собираетесь покорять вершины.

Как выбирать Электромотор и ESC?
Если упростить задачу выбора, то она сводится к выбору под ваш масштаб. Просто ищите в описании под какие масштабы и классы данный электромотор/регулятор. Разумеется это не совет для профессиональных гонщиков или тех кто потенциально хочет им стать. Поэтому я поделюсь тем, что сам узнал выбирая себе электромотор.
Тут же хотелось бы дать вам понять, что нужно поменьше слушать «экспертов». Тема довольно сложная, а также обширная и сугубо индивидуальная. Характеристики модели зависят буквально от всего. Начиная от класса и трассы по которой вы будете гонять, заканчивая колесами, подвеской, трансмиссией, весом и так далее. А самое главное зависит от вас, поскольку управлять и получать удовольствие от нее будете именно вы, а не xdickname2010. Если вы человек программирования, то вы прекрасно представляете, что такое холивар на тему какой мотор лучше.
Как типичный нуб, я пошел читать статьи и форумы. Со статьями еще ладно, а вот форумы это ошибка. Вы наверняка услышите ответ на ваш вопрос, после тонны осуждений и рассказов на чем держится мир, но все это того не стоит. Это хобби существует не первый год. Отталкиваясь просто от масштаба вашей модели, вы соберете себе машинку и все будет круто, поэтому не бойтесь ошибиться.
2S или 4S?
Для начала стоит разобраться с тем, что же такое 1S, 2S, 3S, 4S и так далее. Этот параметр будет преследовать везде — начиная от аккумулятора и заканчивая мотором. Параметр будет подписан как voltage — вольтаж. Расшифровывается просто:
1s = 1 банка в аккумуляторе у которой 3.7v в номинале
2S, это уже аккумулятор у которого две банки по 3.7v, последовательно соединенных и суммарно дающих 7.4v. Чем больше вольтажа тем больше скорости и мощности. 3S — 4S это максималочки для масштаба 1:8. Про выбор аккумулятора, а также особенности мы поговорим в отдельной статье. Пока это все, что нужно знать.
Электромотор
Электромоторы бывают двух основных видов — Коллекторные и Бесколлекторные..
Коллекторные двигатели (brushed, щеточные) дешевле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны.
Вы наверняка где-то видели такие моторчики:

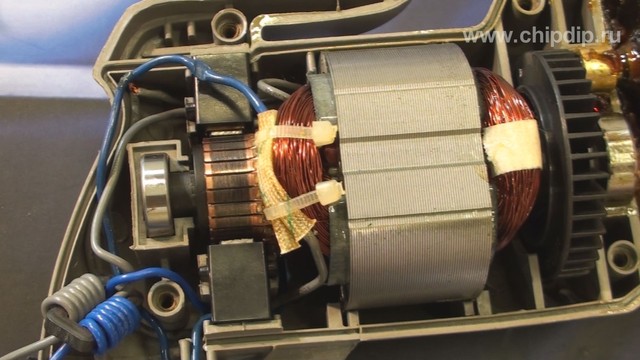
Вот именно это и есть коллекторный мотор. Если внимательно посмотреть на его строение, то самый главный минус очевиден:
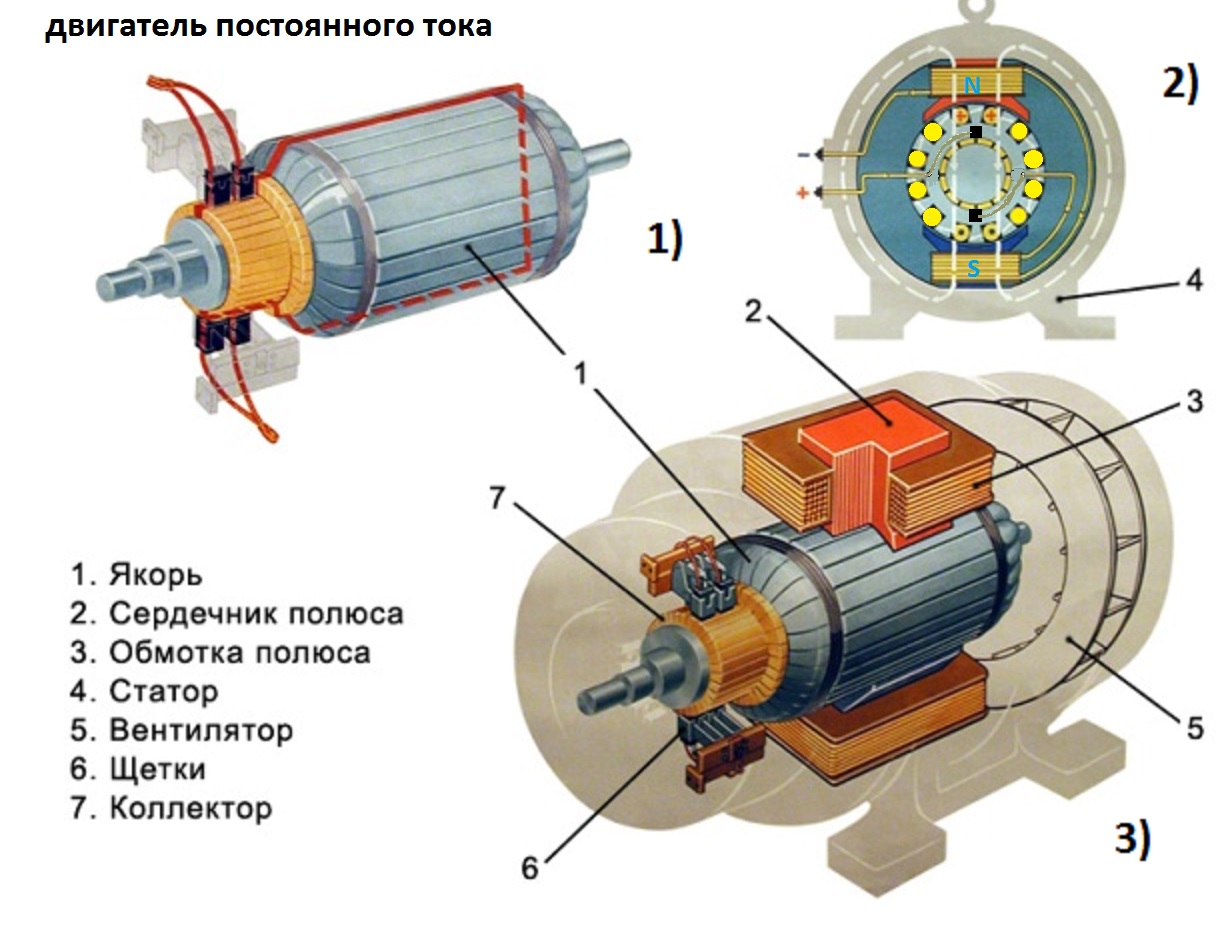
Щетки и коллектор механически повреждаются от трения:
Как любой вид электромотора, ротор разгоняется электрическим полем. Величина этого поля зависит от напряжения приложенного к обмоткам, чем большее магнитное поле будет создано, тем быстрее будет крутиться ротор. Питается мотор постоянным током.
Бесколлекторные двигатели (brushless, бесщёточные) – дороже, но способны развить большую скорость, а также более износостойкие. Модель ездит и быстрее, и дольше.
Это более сложный в строении мотор и требует регулятор для работы. (Я так понимаю коллекторный тоже, но в меньшей степени). Подав ток на такой мотор, крутиться вы его не заставите. Износостойкий поскольку щеток у него нет, ротор буквально не соприкасается не с чем кроме подшипника на выходе.
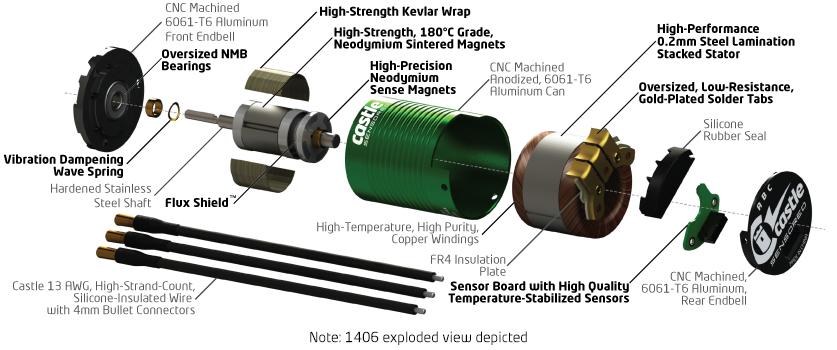
(Это схема навороченного мотора от Castle Creations, но в целом типичная для среднего бесколлекторного мотора на рынке)
Сами бесколлекторные моторы делятся на еще несколько видов. Первый параметр — расположение ротора.
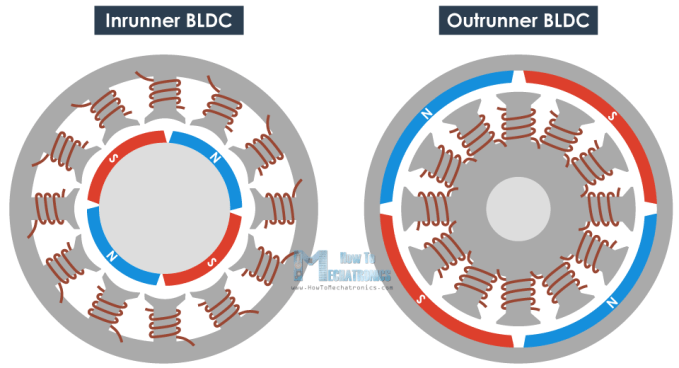
Inrunner — именно этот тип используется в машинках. Движущая часть находится внутри.
Outrunner — крутится сам корпус мотора. Такие чаще всего используются в квадрокоптерах.
Сенсоры
Второй, и более интересный параметр — сенсоры.
Существуют Sensored и Sensorless. То есть с сенсором и без сенсора.
Причем тут сенсоры? Очень резонный вопрос.
Дело в том, что для того, чтобы раскрутить ротор, регулятору необходимо понимать, куда «стрелять». У мотора есть 3 фазы, если не углубляться в схему, то суть в том, что для вращения ротора регулятору необходимо задействовать те или иные магниты в зависимости от положения ротора.

Именно для нахождения положения ротора и используются сенсоры.
Звучит логично, но какая мне разница, что он там и как делает? Дело в том, что от этого зависит сможет ли ваша машинка медленно ездить, а так же плавней и нежней газовать, тормозить. Если вы хотите себе Crawler, а это модели которые ездят медленно, взбираясь по «горам», то вам точно нужен именно сенсорный мотор.

(у сенсорных моторов на попе дополнительный разъем. Обращайте внимание на спецификацию ESC регулятора, он может не уметь работать с сенсорными моторами. Работать мотор будет, но от сенсора не будет толку)
Бесколекторный бессенсорный мотор не может плавно стартовать, так как регулятор не знает изначальное положение ротора. И поэтому он будет вращать его наугад. Если не придавать должного газку, модель может и не поехать. С началом хоть какого-нибудь вращения вступают в силу электромагнитные приколы индукции и регулятор понимает, что и куда.
Если вы любитель погонять, и любитель резких стартов с пылью, то бессенсорный для вас, лично я своим вполне доволен
Но исходя из общения с людьми которые участвуют в гонках, для лучшего «чувствования» модели, все равно необходим сенсорный мотор.
KV у меня большое, а у меня меньше и рад!
Это космос по размерам холиваров, сколько же Kv вам необходимо. Для машинок типичные значения лежат в рамках 1800Kv — 2600Kv.
Грубо говоря, Kv, это количество оборотов на вольт. То есть взяв мотор с 2300Kv, подав на него без нагрузки один вольт, он раскрутит ротор до 2300 оборотов.
Сколько же оборотов мне нужно? На такой вопрос ответ нагуглить сложно. Но отталкиваться стоит от следующего:
Чем меньше Kv тем больше крутящий момент, тем больше тяги у мотора, тем он медленней. Чем больше Kv, тем меньше тяги, тем он быстрей.
У моего мотора TrackStar 2300Kv, 2 полюса и обмотка дельтой. Модель весом под 6 кг. стартует резво, ездит быстро, динамичная (во время довольно быстрой езды, я могу газануть и она встанет на дыба, то есть запаса резвости мне хватает). Поэтому мне сложно делать рекомендации, у меня опыт только с одним мотором и на форуме эксперты меня свято уверяли, что это будет черепаха и мотор вообще ацтой! Про то, что мотор ацтой мне и на треке говорили — а я доволен. Поэтому это все очень субъективно и с выбором идеального мотора как теоретически так и практически можно повременить, освоившись хотя бы с одним. Иначе как понять разницу?
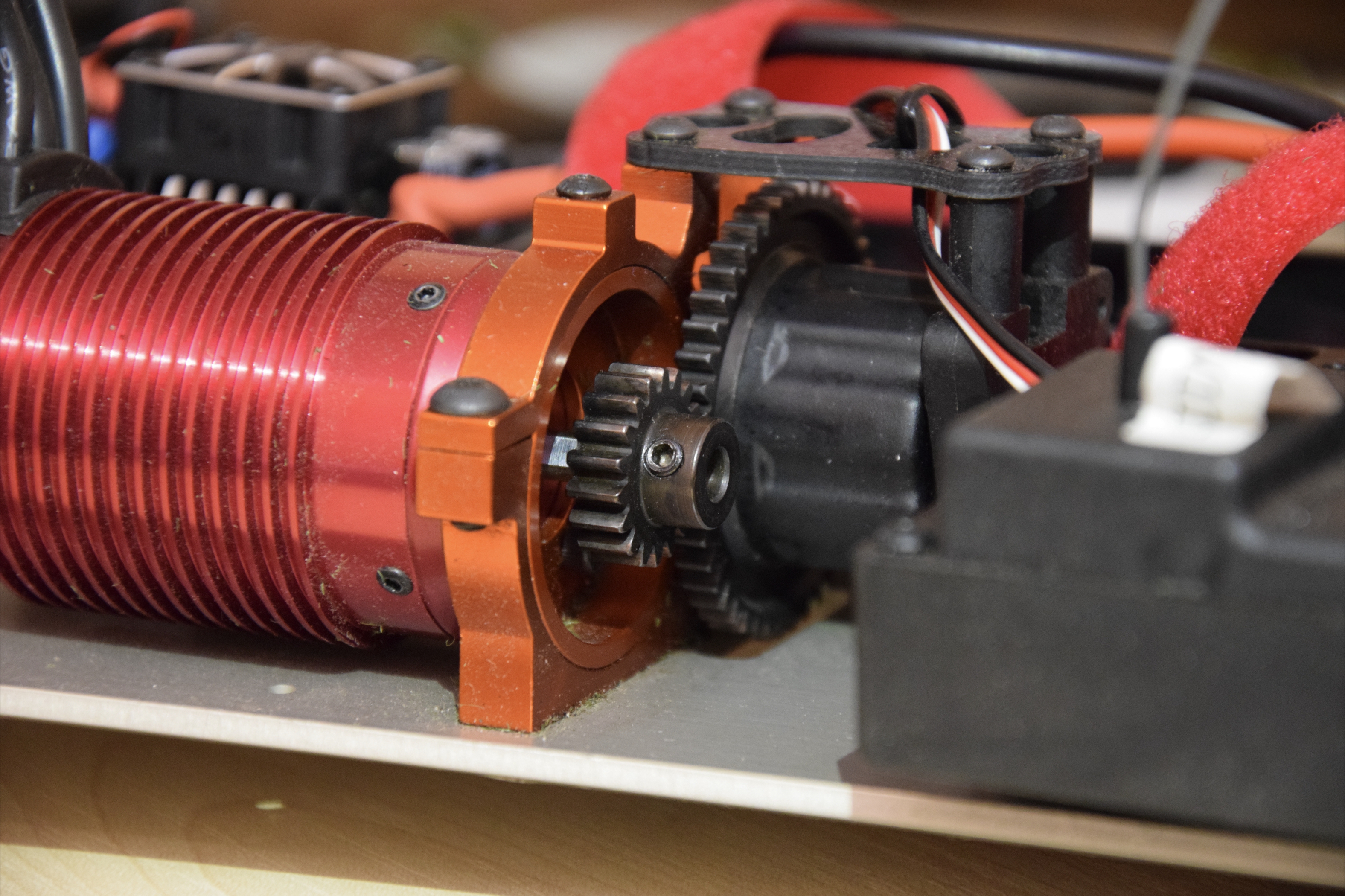
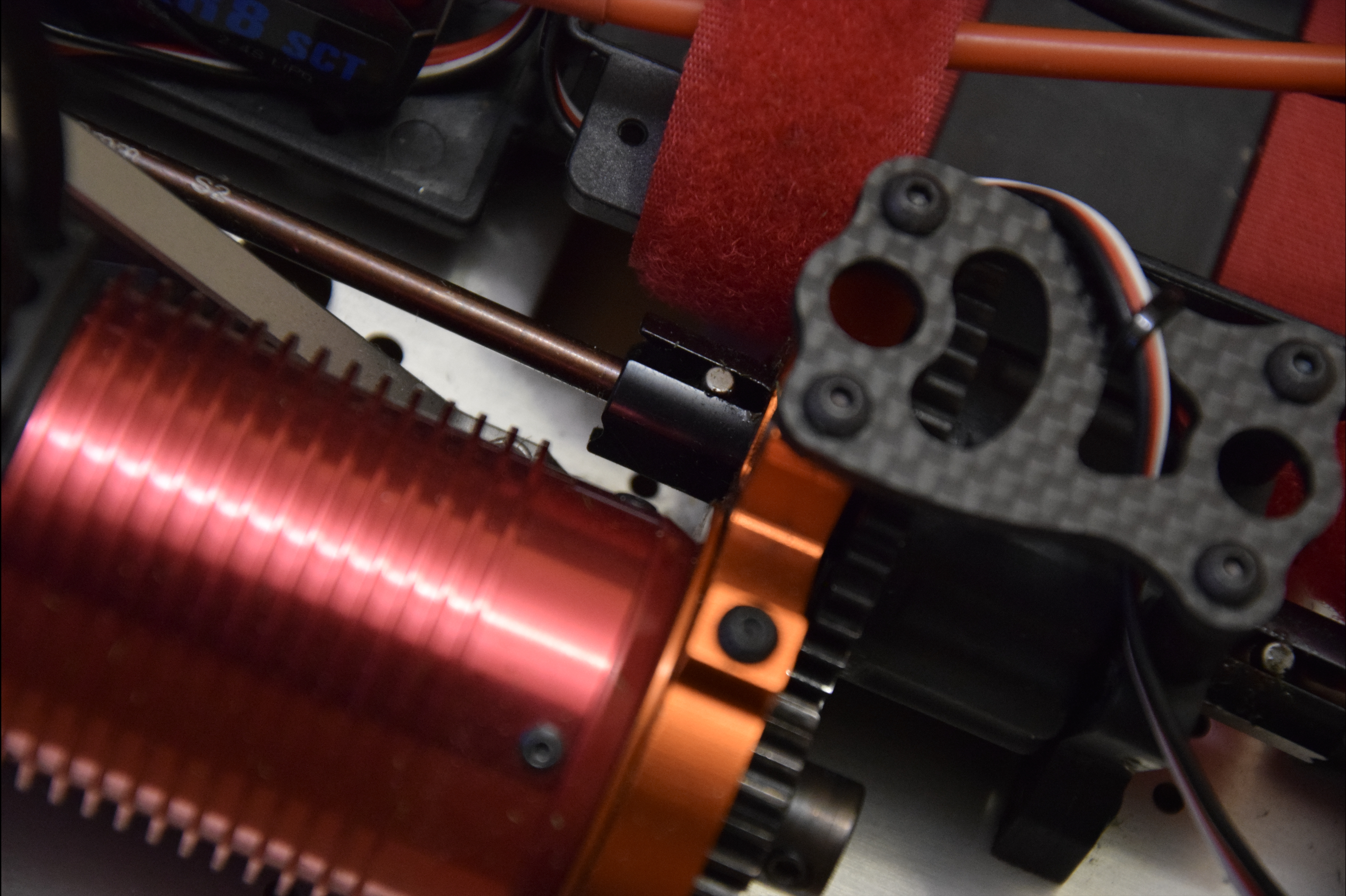
Передаточного отношения
На фото можно увидеть две шестеренки, пиньон (которая на моторе) и спур (которая большая, на дифференциале). В полезных ссылках я оставил пару статей на тему передаточного отношения. Важно не перегрузить мотор, но и не давать ему легкой жизни.
Изменение количества зубьев пиньона и спура изменяет передаточное отношение трансмиссии, что напрямую влияет на 2 показателя:
Количество витков, количество полей, тип обмотки, сопротивление, температура
Не забивайте себе голову этим бредом, действительно не стоит. Если все таки очень хочется, то ссылки в конце статьи в вашем распоряжении.
Шпаргалка для холиваров:
В рамках одной модельной линейки моторы с разным Kv отличаются количеством витков обмотки — чем меньше витков, тем больше Kv.
Чем больше полей тем меньше Kv и больше тяги. Чем меньше полей, тем больше оборотов и меньше тяги. Я так понимаю это из за того, что ротор проворачивается быстрей между двумя магнитами по своей оси, чем между 5.
Нормальная температура двигателя до
90-100 градусов. У меня на треке больше 60 не было. Большая температура плоха, тем, что влияет на параметры цепи. При высоких температурах магниты могут потерять свою силу. Если быть совсем задротом, то еще можно сказать, что при высоких температурах сопротивление от электромагнитной индукции мотора снижается и сила тока растет, что может привести к перегреву, замыканию и возгоранию мотора. Так же это верно, если вы заблокируете колеса, и за счет того, что вращения нет, индукции нет, он вскоре сгорит.
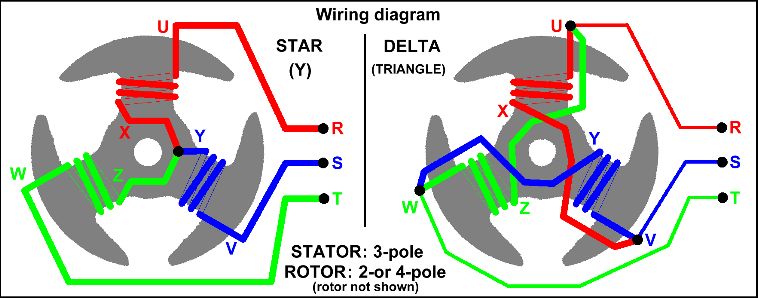
Обмотка дельтой или звездой — как я понимаю на текущий момент, это способы передачи электричества по 3м фазам, принцип подключения так сказать. В больших, не для машинок электромоторах при запуске схемы «звезда» и «треугольник» переключаются автоматически, так как это позволяет снизить нагрузку по току, возникающую при пуске мотора. Например на старте звезда, а дальше дельта.
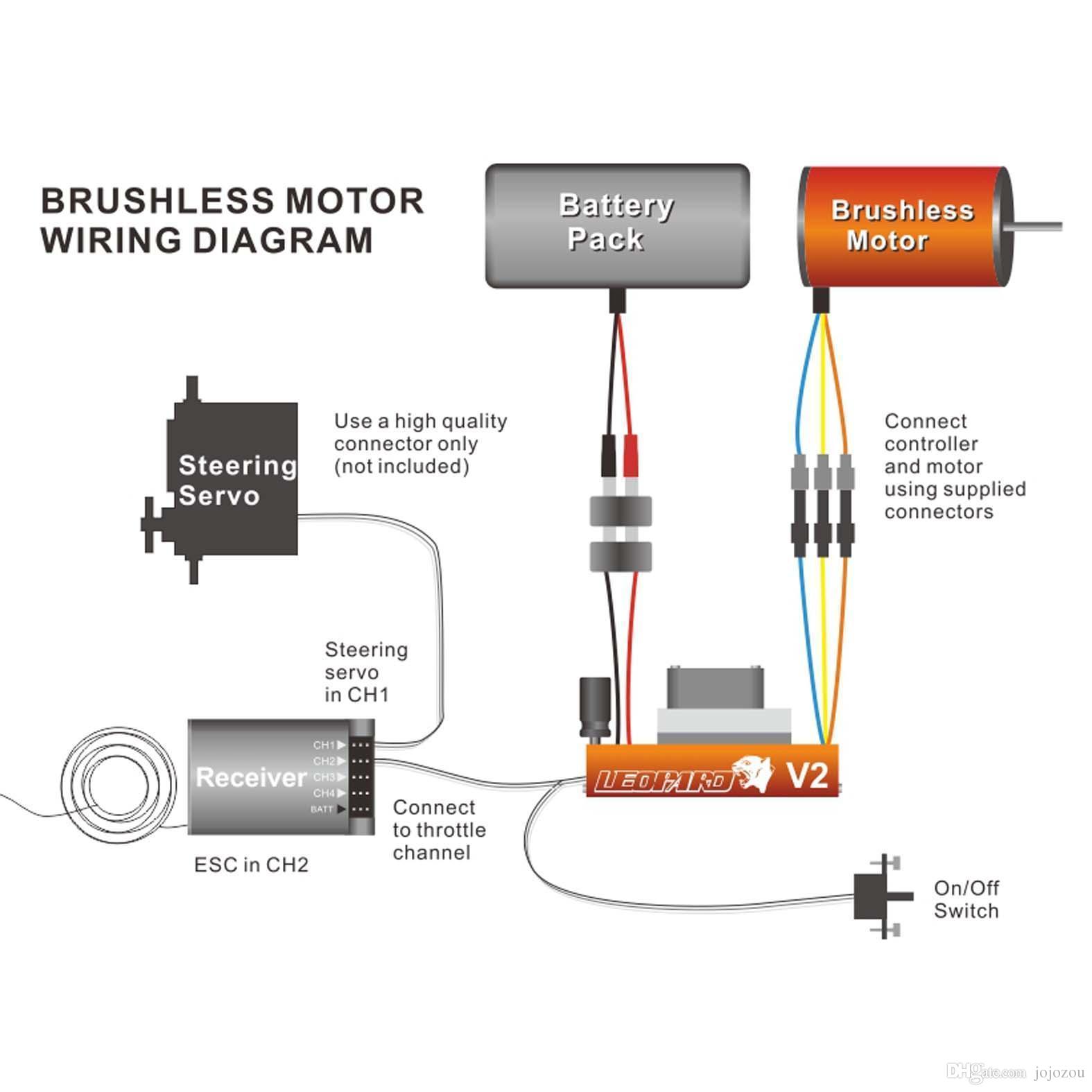
ESC регулятор
(схема работы ESC, и ветвления типа «звезда», видео в полезных ссылках)
ESC — Electronic Speed Controller, электронный регулятор скорости. Подключается к радиоприемнику и управляет электромотором, а так же питает сервопривод (моторчик для лево/право).
(3 провода слева идут к мотору, красный с черным справа, подключается к аккумулятору)
Выбирать регулятор стоит с небольшим запасом и с мыслью в голове, что его можно использовать не только для автомоделей, и не только с каким-то конкретным мотором. Желательно брать регулятор который умеет работать с сенсорными моторами, даже если вы не планируете покупать такой мотор. На вырост так сказать.Из основных деталей регулятора помимо главной схемы, можно выделить BEC и конденсаторы.
BEC используется для понижения вольтажа от аккумулятора для приемлемых сервоприводу и радиоприемнику. Ведь сервопривод и радиоприемник питаются именно от ESC. Если вы особый энтузиаст, то бывают люди которым не хватает встроенного и они паяют свой BEC.
Конденсаторы сглаживают скачки напряжения в цепи, они могут случаться как при старте так и при торможении/прекращении питания мотора за счет индукции самих проводов (да и такое бывает, сам в шоке, в полезных ссылках есть линк на форум). Как в случае с BEC, если вам не хватает встроенных конденсаторов, вы можете их допаять.
Для настройки регуляторов используются программные карты:

Как привило там можно настроить отсеку по вольтажу (если падает вольтаж, это значит, что ваш аккумулятор разряжается и это потенциально опасно, так как падает вольтаж, растут амперы, температура и вуаля). Так же там настраивается максимальная сила торможения, изначального импульса, вкл/выкл заднего хода и тд.
Не покупайте программные карты под ESC. Они наверняка будут у местных любителей или владельцев трасс
Амперы и Вольтаж
Про вольтаж, мы уже знаем. 3S-4S нас не пугают.
Amps — в спецификации к моторам это третье по важности, на что следует обращать внимание.
Cont Current: 80A — Сила тока в номинале, то есть хоть часами гоняйте при таком токе и все будет хорошо.
Max или Burst current: 120A — Максимальная сила тока, кратковременная. Например при старте или торможении.
Ответить на вопрос, сколько же тока будет ходить по системе без экспериментов невозможно. Рассчитывайте с запасом, но адекватным. Регулятор для мотора должен обладать теми же значениями, а лучше чуть побольше. Например для мотора с примера выше подойдут параметры — Cont 90A, Burst 140A.
Можно отталкиваться от мощности мотора, например:
Мощность мотора 1600W, используя аккумулятор 4S мы получим — 1600W / (4 * 3.7v) = 108A.
Про аккумуляторы будет отдельная статья, но забегая на перед, 3.7v это номинальный вольтаж (средний). Полностью заряженная банка дает 4.2v, поэтому сила тока будет еще меньше. Не забывайте, что это расчет на максимальных числах. В реальности у модели есть стадия разгона, торможения, инерции.
Если брать в расчет, что по цепи у моей модели ходит ток 108A, то коннекторы от аккумулятора к регулятору у меня должны были уже давно сгореть. Но все в порядке. Даже не хочу вас пугать и расписывать вам какие коннекторы сколько выдерживают. У меня мотор +1600W и t-plug в документации которых заявлено 45A, максимум 60A, после часа покатушек даже не греются. Поэтому не переживайте сильно как это делал я, насчитал себе 150A под нагрузкой. Таких нагрузок попросту не бывает в масштабе 1:8, если у вас не квадратные колеса.
(t-plug)
Комбо ESC + Электромотор
Вы когда нибудь покупали зеркалку? Наверняка вы знаете, что есть тушка и объектив. По факту это две вещи которые необходимы для того, чтобы делать фотографии. То как вы будете делать фотографии и какими они у вас будут получатся зависит в равной степени от каждой из них (конечно если не брать во внимание пост-обработку). Отличным советом новичку будет — берите китовую версию. В ней тушка и объектив идут в одной коробочке и идеально друг к другу подходят. (Профессионалы, конечно же предпочтут покупать все по отдельности, но это уже другая история)

Паять или не паять, вот в чем вопрос
Частенько моторы и регуляторы идут с проводами в комплекте, но не припаяны. Причин несколько: диаметр провода зависит от токов вашей машинки, длина провода зависит от расположения деталей на шасси. Если вы уверенно паяете, то вам без разницы. Единственно помните — самые слабые места в цепи это места спайки
Если у вас нет паяльника и опыта в этом деле, то вы можете обратится к людям на треке или в сервисные центры. На треке получится условно бесплатно.
Влагозащита
Аккумуляторы воды не боятся, моторы не боятся. А вот регулятору и сервоприводу можешь поплохеть. Поэтому если вы планируете купать свою машинку, то обращайте внимание на приписку waterproof. Единственный минус таких регуляторов, это сложность ремонта, так как микросхемы заливаются смолой
Магазины, где покупать
В первой статье я малость задел эту тему, но похоже следует написать лишний раз. В России, Украине, не так много или же практически нет производителей запчастей для машинок. В основном весь товар импортный. Поэтому следует думать о налогах которые вы потенциально можете заплатить покупая на зарубежный сайтах.
Попросите магазин занизить стоимость
Из известных магазинов можно выделить hobbyking, на нем есть как товары его брендов, так и других. Например Turnigy. Но комплектующие от Turnigy, не славятся самыми топовыми характеристиками. Хотя мотором я доволен. Покупал я свое комбо именно там. А также шасси. Что по факту большая часть машины. Есть еще horizonhobby, rcsuperstore, rcplanet и так далее. На самом деле я их нагуглил только, что Дело в том, что я бы рекомендовал изучать товар на этих сайтах, а искать и покупать уже на локальном рынке. Локальные магазины очень быстро гуглятся и как правило вы найдете все, так как их не так много, ввиду наверное относительно высокой стоимости комплектующих. Разница в цене между заграничным + налоги и локальным не такая большая, что бы запариваться с оплатой и ожиданием доставки.
Найдите клубы, друзей, организации которые занимаются этим хобби
Тогда вы наверняка сможете покупать товар по скидочке.
Компании комплектующих которые на слуху: hobbywing — моторы у них как правило черно белые, словно зебра и castle creations — моторы как правило зеленые (с таким описанием на треке вы как профи будете различать комплектующие у других. А вообще на моторах как правило бренд написан). Обе занимаются по большей части ESC и электромоторами. В чем между ними разница я сказать не могу, опыт только с hobbywing. Меня он устраивает. Castle creations ценником подороже и судя по обзорам там больше настроек. Вы же понимаете, каждому свое и чтобы получить максимум, нужно четко понимать зачем оно надо. Пока вы начинающий, берите +- среднее. Вам хватит с головой, я уверен.
Далее будет
Я немного пересмотрел список, по факту нам осталось рассмотреть сервоприводы, аппаратуру и радиоприемник. И небольшую экзотику на тему, как управлять ESC или сервой с помощью raspberry pi.
Полезные ссылки
tvr Спасибо, поправил ошибки
Duke_nukeum Спасибо, поправил ошибку
sciomenihilscire Спасибо, поправил ошибку
NiPh Спасибо, поправил ошибку
mtkachowA Спасибо, минут десять все исправлял))
PendalFF Спасибо
RC Машинки: Первые покупки — шасси и силовая установка
Силовая установка — звучит как-то странно, но если подумать, то очень четко описывает те самые компоненты которые заставляют модель двигаться. Не уверен входит ли сюда сервопривод (лево/право). Если вы читали первую часть этого цикла, то вы знаете, что есть модели на ДВС и на электромоторах. Так как по большей части я описываю свой опыт — речь пойдет об электромоторах и комплектующих под них.
Написать методичку по электромоторам и регуляторам дело скучное и занудное. Я добавлю полезных ссылок в конце, для более любознательных. В этой статье мы рассмотрим тот МАКСИМУМ, который вам необходимо знать, как для человека который хочет веселиться + не упасть лицом в грязь, в холиварах на районе. Я постараюсь написать, о том, что действительно важно и чем руководствовался сам.
Как типичный программист я пошел путем сложным, пытаясь понять как все оно работает и пытаться найти лучшее. Но на деле нельзя вот просто взять рассчитать и спланировать все заранее.
Вы наверняка наблюдали за запусками ракет которые в последний момент отменяли. Цена ошибки высока и на испытание требуется время и подготовка. Я не знаю, почему меня это прикалывает, но вот как-то так. С реальными хобби, если вы купили, что-то не то или что-то сломали, не получится просто скачать другую программу или библиотеку решив проблему. Доставку новых запчастей придется ждать дни или даже недели.
Узнать что необходимо подкрутить или затюнить возможно только тогда, когда вы выберетесь на трек. Хорошо если это будет раз в неделю. Поэтому меньше читайте и слушайте экспертов. Лучше пробуйте. Математика тут непростая и на такие вопросы как «А не перегреется ли мой мотор через пару кругов?» вы попросту устанете отвечать. Проще проехать и замерить
Строение RC машинки
Прежде чем идти в магазин, логично разобраться в том, из чего состоят эти машинки. С этим особых трудностей у меня не возникло. Комплектующих не так много.
- Шасси
- Электромотор
- ESC (управляет электромотором)
- Сервопривод
- Аккумулятор
- Аппаратура (для управления)
С машинками, как и с компьютерами, выбор огромный. В первой статье мы рассмотрели разные классы машинок. Их можно приобрести готовыми, наполовину готовыми или же просто необходимым набором комплектующих. Если вам интересны готовые, то я не понимаю, что вы тут делаете?
Готовые бывают с пометкой RTR — Ready to run, то есть готовые к покатушкам. Такие комплекты идут даже с аппаратурой из коробки.Понятное дело, такие модели больше подойдут либо тем, кто в данный момент вообще не хочет разбираться, либо в подарок.
ARR — Almost Ready to Run, то есть почти готовые к покатушкам. Как правило это шасси с мотором, ESC регулятором и сервоприводом. Вам нужно докупить аппаратуру, аккумулятор, зарядник.
А так же есть Kit версия. Это просто шасси. Корпус так сказать. Может быть в собранном виде, а может и в разобранном. Я бы, наверное, порекомендовал брать собранные. Если вы новичок, перебрать ее успеете. Хотя, если вы автовладелец, думаю необходимые навыки у вас уже есть
Шасси
Под шасси подразумевают то к чему все крепится — подвеска, колеса etc. Продаются как в собранном виде так и разобранном. Уверен можно собрать вообще все по деталькам. С непривычки разобраться довольно сложно. Амортизаторы, трансмиссия, всякие дифференциалы, кулаки и много того, чему я даже не знаю точного названия.
Выбор шасси в большей степени обусловлен классом модели который вы хотите, масштабом и запасом прочности.
(под ДВС может немного отличаться креплениями, корпусом)
Я такой человек, что любит в первую очередь глазами, и поэтому увидев свое шасси, офигел от того насколько все прикольно и круто выглядит. Особо долго не думая, решил, что буду брать именно эту модель. У меня BSR Berserker 1/8 Truggy Kit.
В инcтаграммах есть разные аккаунты на тему RC. Если вы любитель эстетики, то там можно насмотреться всякой красоты на эту тему. Например хештег #rccars.
При выборе стоит обращать внимание на материалы. Чем они дешевле, тем чаще вам придется закупаться расходными деталями. Я не экстремальный гонщик и ничего из деталей шасси на замену еще не покупал, но судя по наличию расходников в продаже и видео в интернете как ломаются машинки — об этом стоит думать.
Чем больше пластмассы в шасси тем оно считается дешевле и хрупче. Но это не означает, что оно целиком должно быть из карбона или алюминия, хотя такое бывает
Как правило материалы миксуют, что обусловлено стремлением к адекватному весу и тем, что не всегда металл лучше. Например, основа и «бабочки» (то, к чему крепятся рычаги подвески и амортизаторы) — алюминий, рычаги подвески — «крепкая пластмасса», а прочие мелкие некритичные крепления — пластмасса «попроще».
(Сюда крепятся колеса у моего шасси)
Задняя бабочка металлическая, к ней крепятся амортизаторы, рычаги подвески, спойлер. Ниже крепится дифференциал (пластик). Клиренс модели регулируется установкой амортизаторов на различные отверстия на бабочке, рычагах подвески, а также заменой самих амортизаторов.
На фото также видно стабилизатор поперечной устойчивости. Изначально шасси было без него, но он шел в комплекте. После первого дня покатушек, понял, что машинка частенько переворачивается на поворотах и все-таки решил поставить стабилизацию. Радости как у настоящего механика Похоже Lego в детстве мне не хватило.
У шасси, как и настоящих машин, бывает разная трансмиссия. Полный/неполный привод. Например у моей модели привод полный и аж 3 дифференциала. Передний, задний и по центру который ближе всех к мотору, для согласования задних и передних колес. Дифференциалы соединены валами:
Бывает и ремнями:
Дифференциалы заливаются специальной жидкостью. Эта жидкость бывает различной вязкости. Причем если как у меня 3 дифференциала, то в каждый из них может пойти своя вязкость в зависимости от ваших потребностей (честно, я катаю с тем, что пришло с завода и понятия не имею на что оно влияет, вероятно на управляемость в повороте).
Из интересных особенностей строения — бывают горизонтальные амортизаторы:
В общем, как вы понимаете, поле для тюнинга и настроек шасси безграничное. Но в первую очередь, оно зависит от трека на котором вы собираетесь покорять вершины.
Как выбирать Электромотор и ESC?
Если упростить задачу выбора, то она сводится к выбору под ваш масштаб. Просто ищите в описании под какие масштабы и классы данный электромотор/регулятор. Разумеется это не совет для профессиональных гонщиков или тех кто потенциально хочет им стать. Поэтому я поделюсь тем, что сам узнал выбирая себе электромотор.
Тут же хотелось бы дать вам понять, что нужно поменьше слушать «экспертов». Тема довольно сложная, а также обширная и сугубо индивидуальная. Характеристики модели зависят буквально от всего. Начиная от класса и трассы по которой вы будете гонять, заканчивая колесами, подвеской, трансмиссией, весом и так далее. А самое главное зависит от вас, поскольку управлять и получать удовольствие от нее будете именно вы, а не xdickname2010. Если вы человек программирования, то вы прекрасно представляете, что такое холивар на тему какой мотор лучше.
Как типичный нуб, я пошел читать статьи и форумы. Со статьями еще ладно, а вот форумы это ошибка. Вы наверняка услышите ответ на ваш вопрос, после тонны осуждений и рассказов на чем держится мир, но все это того не стоит. Это хобби существует не первый год. Отталкиваясь просто от масштаба вашей модели, вы соберете себе машинку и все будет круто, поэтому не бойтесь ошибиться.
2S или 4S?
Для начала стоит разобраться с тем, что же такое 1S, 2S, 3S, 4S и так далее. Этот параметр будет преследовать везде — начиная от аккумулятора и заканчивая мотором. Параметр будет подписан как voltage — вольтаж. Расшифровывается просто:
1s = 1 банка в аккумуляторе у которой 3.7v в номинале
2S, это уже аккумулятор у которого две банки по 3.7v, последовательно соединенных и суммарно дающих 7.4v. Чем больше вольтажа тем больше скорости и мощности. 3S — 4S это максималочки для масштаба 1:8. Про выбор аккумулятора, а также особенности мы поговорим в отдельной статье. Пока это все, что нужно знать.
Электромотор
Электромоторы бывают двух основных видов — Коллекторные и Бесколлекторные..
Коллекторные двигатели (brushed, щеточные) дешевле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны.
Вы наверняка где-то видели такие моторчики:
Вот именно это и есть коллекторный мотор. Если внимательно посмотреть на его строение, то самый главный минус очевиден:
Щетки и коллектор механически повреждаются от трения:
Как любой вид электромотора, ротор разгоняется электрическим полем. Величина этого поля зависит от напряжения приложенного к обмоткам, чем большее магнитное поле будет создано, тем быстрее будет крутиться ротор. Питается мотор постоянным током.
Бесколлекторные двигатели (brushless, бесщёточные) – дороже, но способны развить большую скорость, а также более износостойкие. Модель ездит и быстрее, и дольше.
Это более сложный в строении мотор и требует регулятор для работы. (Я так понимаю коллекторный тоже, но в меньшей степени). Подав ток на такой мотор, крутиться вы его не заставите. Износостойкий поскольку щеток у него нет, ротор буквально не соприкасается не с чем кроме подшипника на выходе.
(Это схема навороченного мотора от Castle Creations, но в целом типичная для среднего бесколлекторного мотора на рынке)
Сами бесколлекторные моторы делятся на еще несколько видов. Первый параметр — расположение ротора.
Inrunner — именно этот тип используется в машинках. Движущая часть находится внутри.
Outrunner — крутится сам корпус мотора. Такие чаще всего используются в квадрокоптерах.
Сенсоры
Второй, и более интересный параметр — сенсоры.
Существуют Sensored и Sensorless. То есть с сенсором и без сенсора.
Причем тут сенсоры? Очень резонный вопрос.
Дело в том, что для того, чтобы раскрутить ротор, регулятору необходимо понимать, куда «стрелять». У мотора есть 3 фазы, если не углубляться в схему, то суть в том, что для вращения ротора регулятору необходимо задействовать те или иные магниты в зависимости от положения ротора.
Именно для нахождения положения ротора и используются сенсоры.
Звучит логично, но какая мне разница, что он там и как делает? Дело в том, что от этого зависит сможет ли ваша машинка медленно ездить, а так же плавней и нежней газовать, тормозить. Если вы хотите себе Crawler, а это модели которые ездят медленно, взбираясь по «горам», то вам точно нужен именно сенсорный мотор.
(у сенсорных моторов на попе дополнительный разъем. Обращайте внимание на спецификацию ESC регулятора, он может не уметь работать с сенсорными моторами. Работать мотор будет, но от сенсора не будет толку)
Бесколекторный бессенсорный мотор не может плавно стартовать, так как регулятор не знает изначальное положение ротора. И поэтому он будет вращать его наугад. Если не придавать должного газку, модель может и не поехать. С началом хоть какого-нибудь вращения вступают в силу электромагнитные приколы индукции и регулятор понимает, что и куда.
Если вы любитель погонять, и любитель резких стартов с пылью, то бессенсорный для вас, лично я своим вполне доволен
Но исходя из общения с людьми которые участвуют в гонках, для лучшего «чувствования» модели, все равно необходим сенсорный мотор.
KV у меня большое, а у меня меньше и рад!
Это космос по размерам холиваров, сколько же Kv вам необходимо. Для машинок типичные значения лежат в рамках 1800Kv — 2600Kv.
Грубо говоря, Kv, это количество оборотов на вольт. То есть взяв мотор с 2300Kv, подав на него без нагрузки один вольт, он раскрутит ротор до 2300 оборотов.
Сколько же оборотов мне нужно? На такой вопрос ответ нагуглить сложно. Но отталкиваться стоит от следующего:
Чем меньше Kv тем больше крутящий момент, тем больше тяги у мотора, тем он медленней. Чем больше Kv, тем меньше тяги, тем он быстрей.
У моего мотора TrackStar 2300Kv, 2 полюса и обмотка дельтой. Модель весом под 6 кг. стартует резво, ездит быстро, динамичная (во время довольно быстрой езды, я могу газануть и она встанет на дыба, то есть запаса резвости мне хватает). Поэтому мне сложно делать рекомендации, у меня опыт только с одним мотором и на форуме эксперты меня свято уверяли, что это будет черепаха и мотор вообще ацтой! Про то, что мотор ацтой мне и на треке говорили — а я доволен. Поэтому это все очень субъективно и с выбором идеального мотора как теоретически так и практически можно повременить, освоившись хотя бы с одним. Иначе как понять разницу?
Передаточного отношения
На фото можно увидеть две шестеренки, пиньон (которая на моторе) и спур (которая большая, на дифференциале). В полезных ссылках я оставил пару статей на тему передаточного отношения. Важно не перегрузить мотор, но и не давать ему легкой жизни.
Изменение количества зубьев пиньона и спура изменяет передаточное отношение трансмиссии, что напрямую влияет на 2 показателя:
Количество витков, количество полей, тип обмотки, сопротивление, температура
Не забивайте себе голову этим бредом, действительно не стоит. Если все таки очень хочется, то ссылки в конце статьи в вашем распоряжении.
Шпаргалка для холиваров:
В рамках одной модельной линейки моторы с разным Kv отличаются количеством витков обмотки — чем меньше витков, тем больше Kv.
Чем больше полей тем меньше Kv и больше тяги. Чем меньше полей, тем больше оборотов и меньше тяги. Я так понимаю это из за того, что ротор проворачивается быстрей между двумя магнитами по своей оси, чем между 5.
Нормальная температура двигателя до
90-100 градусов. У меня на треке больше 60 не было. Большая температура плоха, тем, что влияет на параметры цепи. При высоких температурах магниты могут потерять свою силу. Если быть совсем задротом, то еще можно сказать, что при высоких температурах сопротивление от электромагнитной индукции мотора снижается и сила тока растет, что может привести к перегреву, замыканию и возгоранию мотора. Так же это верно, если вы заблокируете колеса, и за счет того, что вращения нет, индукции нет, он вскоре сгорит.
Обмотка дельтой или звездой — как я понимаю на текущий момент, это способы передачи электричества по 3м фазам, принцип подключения так сказать. В больших, не для машинок электромоторах при запуске схемы «звезда» и «треугольник» переключаются автоматически, так как это позволяет снизить нагрузку по току, возникающую при пуске мотора. Например на старте звезда, а дальше дельта.
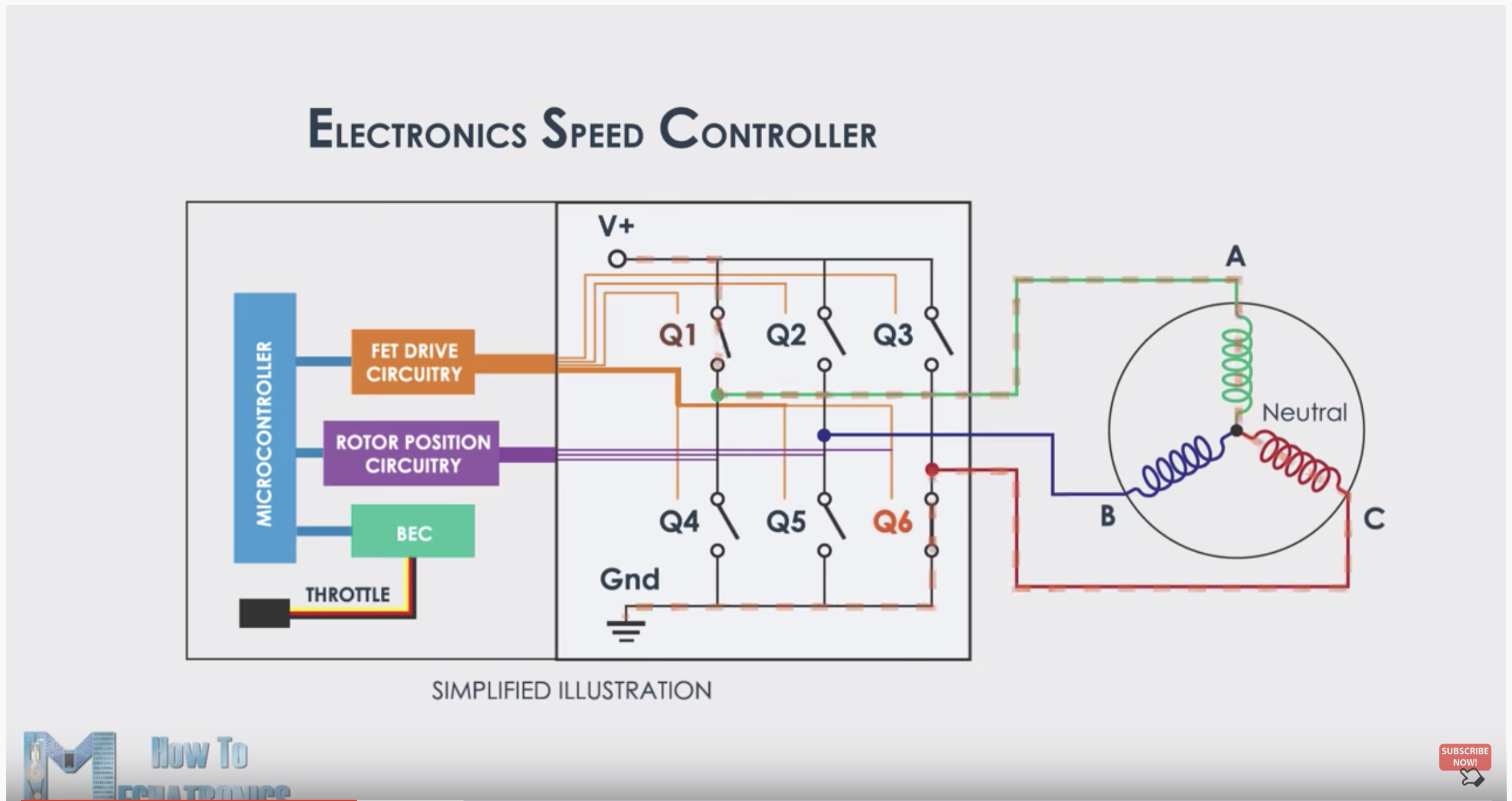
ESC регулятор
(схема работы ESC, и ветвления типа «звезда», видео в полезных ссылках)
ESC — Electronic Speed Controller, электронный регулятор скорости. Подключается к радиоприемнику и управляет электромотором, а так же питает сервопривод (моторчик для лево/право).
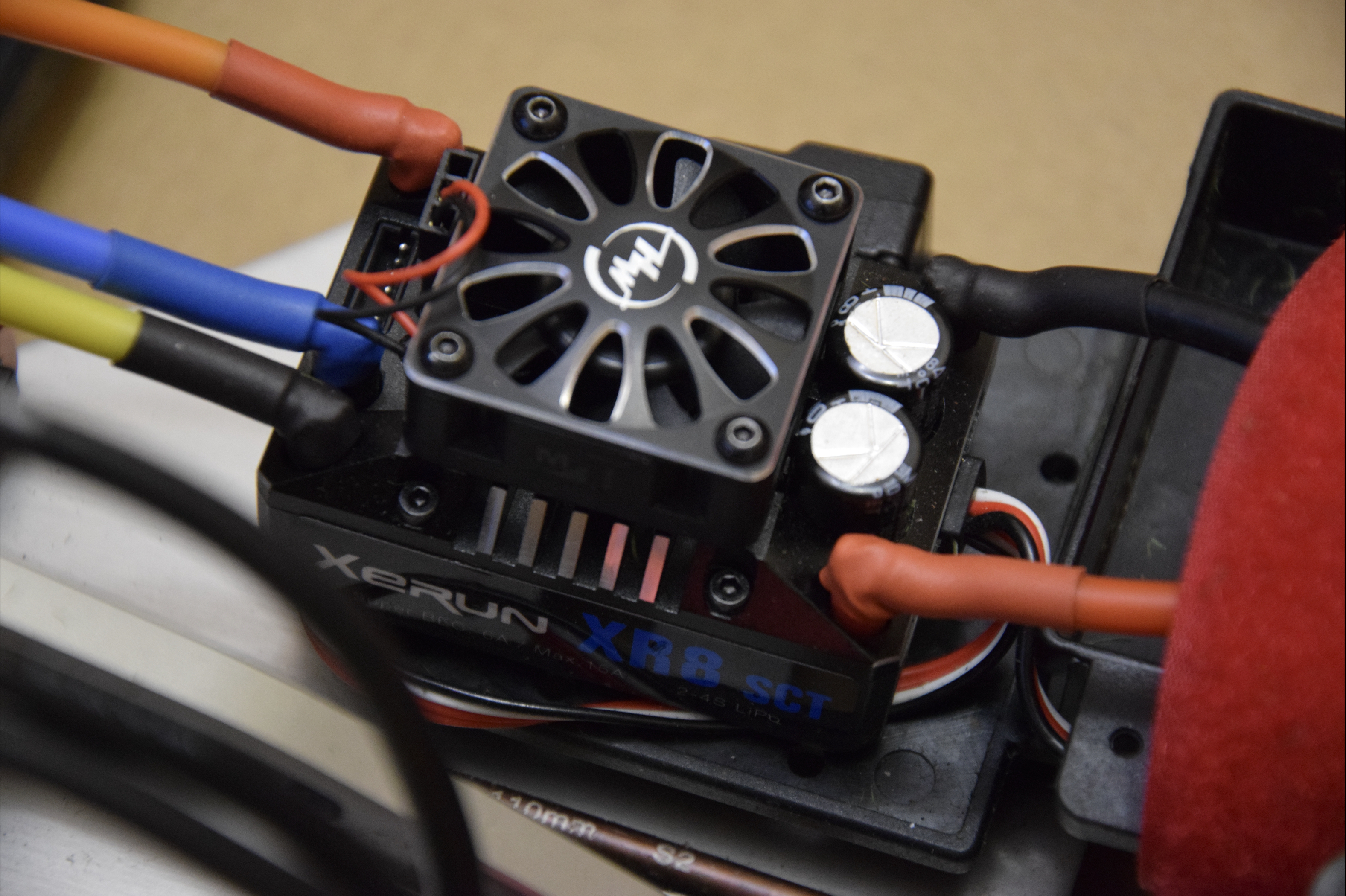
(3 провода слева идут к мотору, красный с черным справа, подключается к аккумулятору)
Выбирать регулятор стоит с небольшим запасом и с мыслью в голове, что его можно использовать не только для автомоделей, и не только с каким-то конкретным мотором. Желательно брать регулятор который умеет работать с сенсорными моторами, даже если вы не планируете покупать такой мотор. На вырост так сказать.Из основных деталей регулятора помимо главной схемы, можно выделить BEC и конденсаторы.
BEC используется для понижения вольтажа от аккумулятора для приемлемых сервоприводу и радиоприемнику. Ведь сервопривод и радиоприемник питаются именно от ESC. Если вы особый энтузиаст, то бывают люди которым не хватает встроенного и они паяют свой BEC.
Конденсаторы сглаживают скачки напряжения в цепи, они могут случаться как при старте так и при торможении/прекращении питания мотора за счет индукции самих проводов (да и такое бывает, сам в шоке, в полезных ссылках есть линк на форум). Как в случае с BEC, если вам не хватает встроенных конденсаторов, вы можете их допаять.
Для настройки регуляторов используются программные карты:
Как привило там можно настроить отсеку по вольтажу (если падает вольтаж, это значит, что ваш аккумулятор разряжается и это потенциально опасно, так как падает вольтаж, растут амперы, температура и вуаля). Так же там настраивается максимальная сила торможения, изначального импульса, вкл/выкл заднего хода и тд.
Не покупайте программные карты под ESC. Они наверняка будут у местных любителей или владельцев трасс
Амперы и Вольтаж
Про вольтаж, мы уже знаем. 3S-4S нас не пугают.
Amps — в спецификации к моторам это третье по важности, на что следует обращать внимание.
Cont Current: 80A — Сила тока в номинале, то есть хоть часами гоняйте при таком токе и все будет хорошо.
Max или Burst current: 120A — Максимальная сила тока, кратковременная. Например при старте или торможении.
Ответить на вопрос, сколько же тока будет ходить по системе без экспериментов невозможно. Рассчитывайте с запасом, но адекватным. Регулятор для мотора должен обладать теми же значениями, а лучше чуть побольше. Например для мотора с примера выше подойдут параметры — Cont 90A, Burst 140A.
Можно отталкиваться от мощности мотора, например:
Мощность мотора 1600W, используя аккумулятор 4S мы получим — 1600W / (4 * 3.7v) = 108A.
Про аккумуляторы будет отдельная статья, но забегая на перед, 3.7v это номинальный вольтаж (средний). Полностью заряженная банка дает 4.2v, поэтому сила тока будет еще меньше. Не забывайте, что это расчет на максимальных числах. В реальности у модели есть стадия разгона, торможения, инерции.
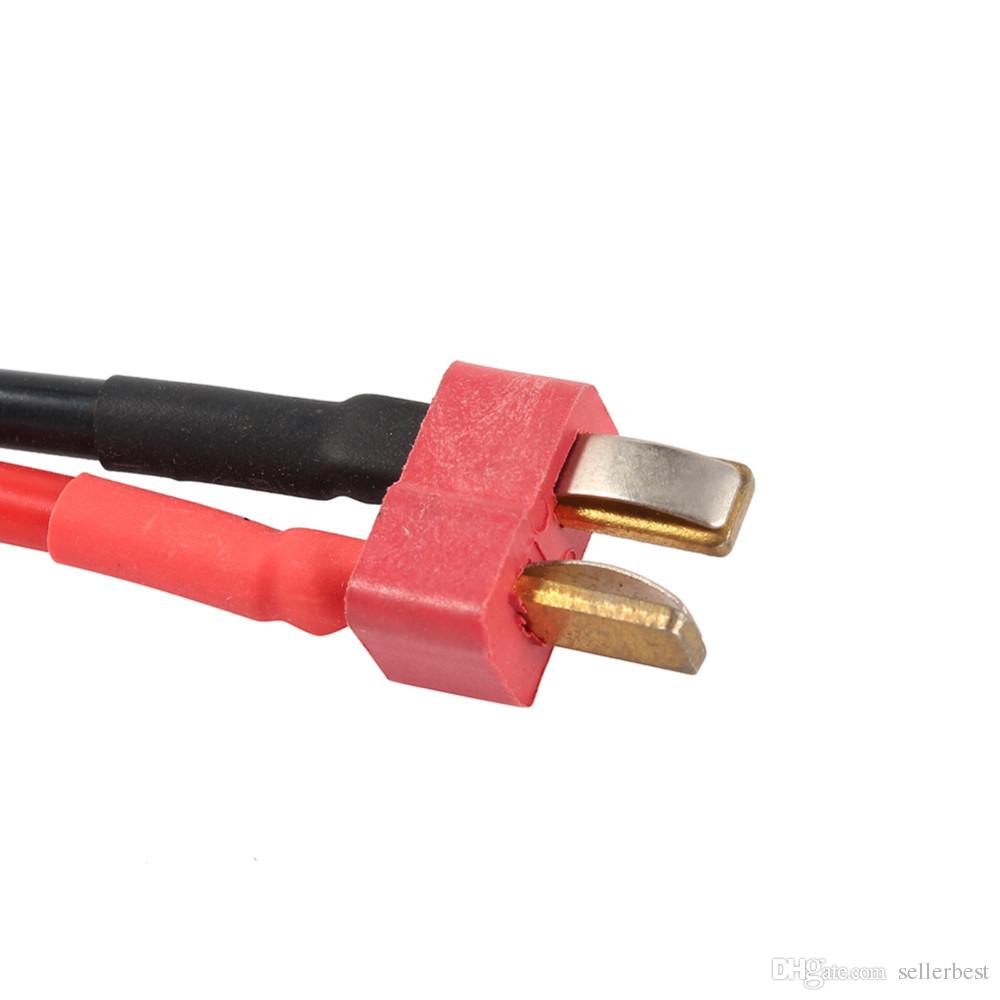
Если брать в расчет, что по цепи у моей модели ходит ток 108A, то коннекторы от аккумулятора к регулятору у меня должны были уже давно сгореть. Но все в порядке. Даже не хочу вас пугать и расписывать вам какие коннекторы сколько выдерживают. У меня мотор +1600W и t-plug в документации которых заявлено 45A, максимум 60A, после часа покатушек даже не греются. Поэтому не переживайте сильно как это делал я, насчитал себе 150A под нагрузкой. Таких нагрузок попросту не бывает в масштабе 1:8, если у вас не квадратные колеса.
(t-plug)
Комбо ESC + Электромотор
Вы когда нибудь покупали зеркалку? Наверняка вы знаете, что есть тушка и объектив. По факту это две вещи которые необходимы для того, чтобы делать фотографии. То как вы будете делать фотографии и какими они у вас будут получатся зависит в равной степени от каждой из них (конечно если не брать во внимание пост-обработку). Отличным советом новичку будет — берите китовую версию. В ней тушка и объектив идут в одной коробочке и идеально друг к другу подходят. (Профессионалы, конечно же предпочтут покупать все по отдельности, но это уже другая история)
Паять или не паять, вот в чем вопрос
Частенько моторы и регуляторы идут с проводами в комплекте, но не припаяны. Причин несколько: диаметр провода зависит от токов вашей машинки, длина провода зависит от расположения деталей на шасси. Если вы уверенно паяете, то вам без разницы. Единственно помните — самые слабые места в цепи это места спайки
Если у вас нет паяльника и опыта в этом деле, то вы можете обратится к людям на треке или в сервисные центры. На треке получится условно бесплатно.
Влагозащита
Аккумуляторы воды не боятся, моторы не боятся. А вот регулятору и сервоприводу можешь поплохеть. Поэтому если вы планируете купать свою машинку, то обращайте внимание на приписку waterproof. Единственный минус таких регуляторов, это сложность ремонта, так как микросхемы заливаются смолой
Магазины, где покупать
В первой статье я малость задел эту тему, но похоже следует написать лишний раз. В России, Украине, не так много или же практически нет производителей запчастей для машинок. В основном весь товар импортный. Поэтому следует думать о налогах которые вы потенциально можете заплатить покупая на зарубежный сайтах.
Попросите магазин занизить стоимость
Из известных магазинов можно выделить hobbyking, на нем есть как товары его брендов, так и других. Например Turnigy. Но комплектующие от Turnigy, не славятся самыми топовыми характеристиками. Хотя мотором я доволен. Покупал я свое комбо именно там. А также шасси. Что по факту большая часть машины. Есть еще horizonhobby, rcsuperstore, rcplanet и так далее. На самом деле я их нагуглил только, что Дело в том, что я бы рекомендовал изучать товар на этих сайтах, а искать и покупать уже на локальном рынке. Локальные магазины очень быстро гуглятся и как правило вы найдете все, так как их не так много, ввиду наверное относительно высокой стоимости комплектующих. Разница в цене между заграничным + налоги и локальным не такая большая, что бы запариваться с оплатой и ожиданием доставки.
Найдите клубы, друзей, организации которые занимаются этим хобби
Тогда вы наверняка сможете покупать товар по скидочке.
Компании комплектующих которые на слуху: hobbywing — моторы у них как правило черно белые, словно зебра и castle creations — моторы как правило зеленые (с таким описанием на треке вы как профи будете различать комплектующие у других. А вообще на моторах как правило бренд написан). Обе занимаются по большей части ESC и электромоторами. В чем между ними разница я сказать не могу, опыт только с hobbywing. Меня он устраивает. Castle creations ценником подороже и судя по обзорам там больше настроек. Вы же понимаете, каждому свое и чтобы получить максимум, нужно четко понимать зачем оно надо. Пока вы начинающий, берите +- среднее. Вам хватит с головой, я уверен.
Далее будет
Я немного пересмотрел список, по факту нам осталось рассмотреть сервоприводы, аппаратуру и радиоприемник. И небольшую экзотику на тему, как управлять ESC или сервой с помощью raspberry pi.
Полезные ссылки
tvr Спасибо, поправил ошибки
Duke_nukeum Спасибо, поправил ошибку
sciomenihilscire Спасибо, поправил ошибку
NiPh Спасибо, поправил ошибку
mtkachowA Спасибо, минут десять все исправлял))
PendalFF Спасибо
Радиоуправляемая машина — Radio-controlled car
Радиоуправляемые автомобили (или сокращенно радиоуправляемые автомобили ) — это миниатюрные модели автомобилей или грузовиков, которыми можно управлять на расстоянии с помощью специального передатчика или пульта дистанционного управления. Термин «RC» использовался для обозначения как «дистанционно управляемый», так и «радиоуправляемый», где «дистанционное управление» включает транспортные средства, которые управляются с помощью радио, инфракрасного излучения или физического проводного соединения (последнее теперь устарело). Распространенное использование «RC» сегодня обычно относится только к автомобилям, управляемым по радио, и эта статья посвящена только радиоуправляемым автомобилям.
Машины питаются от разных источников. Электрические модели приводятся в действие небольшими, но мощными электродвигателями и аккумуляторными никель-кадмиевыми , никель-металлогидридными или литий-полимерными элементами. Существуют также щеточные или бесщеточные электродвигатели — бесщеточные двигатели более мощные и эффективные, но и намного дороже, чем щеточные электродвигатели. Большинство модели топливных батарей используют запальную свечу двигатель, небольшие двигатели внутреннего сгорания , питаемые с помощью специальной смеси из нитрометана , метанола и масла (в большинстве случаев смеси касторового масла и синтетического масло ). Эти автомобили называют «нитро». Недавно были представлены исключительно большие модели, которые приводятся в действие небольшими бензиновыми двигателями, подобными двигателям триммера струны , в которых используется смесь масла и бензина. Считается, что с электромобилями легче работать по сравнению с моделями, работающими на топливе, но они могут быть столь же сложными при более высоком бюджете и уровне квалификации. И электрические, и нитро-модели могут быть очень быстрыми, хотя электрические их легче модернизировать и они более универсальны.
В обеих этих категориях доступны как дорожные, так и внедорожные автомобили . Внедорожные модели, которые построены с полностью функциональной внедорожной подвеской и широким выбором шин, могут использоваться на различных типах местности. Дорожные автомобили с гораздо менее прочной подвеской ограничиваются гладкими асфальтированными покрытиями. Есть также раллийные автомобили, которые находятся где-то между бездорожьем и бездорожьем и могут ездить по гравию, грязи или другим рыхлым покрытиям. За последнее десятилетие достижения в области дорожных транспортных средств сделали их подвеску такой же регулируемой, как и у многих современных гоночных автомобилей.
Содержание
- 1 Машинки на радиоуправлении
- 2 модели радиоуправления для хобби
- 2.1 Электрические модели
- 2.2 Модели с нитро-двигателем
- 2.3 Бензиновые модели
- 2.4 Аксессуары и обновления
- 3 Принцип работы
- 4 История
- 4.1 Ранние коммерческие продукты
- 4.2 Современные разработки радиоуправляемых гонок
- 4.3 Телеметрия в гонках RC
- 5 См. Также
- 6 Ссылки
- 7 Внешняя ссылка
Машинки на радиоуправлении игрушечного уровня

Игрушечные радиоуправляемые автомобили обычно производятся с акцентом на дизайн в сочетании с сокращением производственных затрат. Если в автомобиле для хобби есть отдельные электронные компоненты, которые можно заменить по отдельности в случае выхода из строя, то в игрушечных автомобилях обычно используются более дешевые компоненты, которые труднее найти в качестве запасных частей, и единственная электронная плата, интегрированная в конструкцию автомобиля. . Хотя энтузиасты хобби могут смотреть свысока на игрушечные радиоуправляемые автомобили, их обслуживание намного проще, чем у моделей хобби, поскольку количество компонентов значительно меньше, а детали можно собирать практически бесплатно из любой радиоуправляемой игрушечной машинки. аналогичного размера. Производительность, как правило, намного ниже, чем у автомобилей для хобби, но их можно улучшить, добавив запчасти для хобби. Стандартные игрушечные автомобили оснащены более слабыми двигателями и питаются от щелочных или никель-кадмиевых батарей, что означает, что их максимальная скорость обычно составляет всего 5–15 миль в час (8–24 км / ч). Более дешевые модели лишены какой-либо формы подвески, а те, которые имеют подвеску, имеют очень примитивную или рудиментарную конструкцию. Рулевое управление обычно непропорциональное (только с тремя положениями: прямое, полностью левое и полностью правое), и, как правило, нет пропорционального «дросселя», единственными вариантами обычно являются остановка и полная мощность. Большинство игрушечных машинок в основном предназначены для детей, хотя некоторым энтузиастам старшего возраста нравится возиться с ними и улучшать их. Многие автомобили игрушечного уровня также имеют каркасы кузова с высокой детализацией, которые часто адаптированы для использования на автомобилях для хобби, чтобы придать им более масштабный вид.
Радиоуправляемые модели для хобби
В последние годы «готовые к эксплуатации» (или «RTR») модели для хобби стали легко доступны от крупных производителей радиоуправляемых автомобилей, что привлекает многих любителей, которые в противном случае не купили бы комплектный автомобиль. Транспортные средства этого типа практически не нуждаются в окончательной сборке, и в большинстве случаев кузова отправляются окрашенными и отделанными. Осмотр продукта на безопасность для обеспечения правильной работы очень важен, так как возможны травмы операторов или посторонних в результате разборки транспортных средств. Ряд легковых и грузовых автомобилей в настоящее время доступны только в готовом к эксплуатации виде. Растущая популярность RTR побудила многих производителей прекратить производство комплектов автомобилей. Гоночные автомобили с высокими техническими характеристиками, как правило, по-прежнему доступны или продаются только в виде комплектов, а такие компании, как Thunder Tiger , Losi , HPI, Traxxas и Tamiya, продают комплекты и версии RTR с преимуществами версии комплекта , состоящей из обновленных деталей или более низкой стоимости, соответственно. Автомобили для хобби могут стоить гораздо дороже, от 90 до 2000 долларов.
Готов к запуску. Как следует из названия, это предварительно собранные модели, готовые к немедленному использованию. Они развивают скорость около 80 миль в час (130 км / ч), а некоторые модифицированные версии способны развивать скорость 95 миль в час (153 км / ч). Есть версии, которые работают как от батареек, так и от нитро.
Комплект. Транспортные средства в комплекте продаются в виде коробки с отдельными деталями и должны быть собраны перед поездкой. Хотя они требуют больше навыков для запуска, чем автомобиль RTR, относительно простой комплект (например, от Tamiya) — хороший способ узнать больше о работе с автомобилями RC. Многие комплекты очень легко модифицируются с помощью большого количества доступных деталей. Существуют также модели «ARTR» или «Почти готовые к запуску», которые в основном поставляются в собранном виде, но требуют небольшой дополнительной работы перед запуском.
Электрические модели

В моделях с электрическим приводом используются механические или электронные блоки управления скоростью для регулирования мощности, подаваемой на электродвигатель. Доставляемая мощность пропорциональна величине дроссельной заслонки, которую требует передатчик — чем больше вы нажимаете на спусковой крючок, тем быстрее он движется. Напряжение «пульсирует» с помощью транзисторов для получения переменного выходного сигнала с плавными переходами и большей эффективностью. Электронные регуляторы скорости используют твердотельные компоненты для регулирования рабочего цикла , регулируя мощность, подаваемую на электродвигатель. Кроме того, большинство электронных регуляторов скорости могут использовать электродвигатель в качестве магнитного тормоза , обеспечивая лучший контроль над моделью, чем это возможно при механическом регулировании скорости.
Механические регуляторы скорости используют сеть резисторов и переключаются между ними, вращая головку с электродом вокруг пластины, имеющей электрические контакты. Механические регуляторы скорости склонны к медленной реакции, потому что они приводятся в действие сервоприводами, тратят энергию в виде тепла от резисторов , обычно загрязняются и работают с перебоями, а также не имеют специальной тормозной способности. Они появляются только в винтажных RC-моделях и в настоящее время практически устарели.
В большинстве электромобилей до недавнего времени использовались щеточные двигатели, но теперь многие люди обращаются к бесщеточным двигателям из-за их более высокой выходной мощности и потому, что они требуют гораздо меньшего обслуживания. Они оцениваются либо в относительных оборотах, либо в Kv. Число Kv показывает, сколько оборотов в минуту будет вращать двигатель на вольт. Однако способность системы выдавать электроэнергию зависит от качества используемых батарей, проводов и разъемов для подачи питания. Благодаря своей мощности бесщеточные двигатели также используются в более крупных грузовиках-монстрах и багги с нитроэнергетическим двигателем 1/8, которые были преобразованы в электрические. Высококачественные бесщеточные системы могут быть намного более мощными, чем нитро, и могут выполнять такие подвиги, как сальто назад при установке в грузовик-монстр, в первую очередь HPI Savage Flux. В настоящее время производится преобразование газа в электроэнергию в масштабе 1/5, но это редкость из-за высокой цены.
MAGracing — это новая (2012 г.) форма гонок на электро-радиоуправлении. Маленькие автомобили в масштабе 1/32 с питанием от аккумуляторных батарей, а рулевое управление и скорость контролируются пультом дистанционного управления. Дополнительное рулевое управление обеспечивается стальными тросами, спрятанными в поверхности гусеницы, что обеспечивает более точное рулевое управление по сравнению с машинами с дистанционным управлением. Поэтому трассы могут быть намного уже и меньше, что делает систему пригодной для домашних гонок. Автомобили могут быть возвращены на трассу после выключения, используя при необходимости задний ход, так что маршалы на трассе не требуются.
Модели с нитро-двигателем

В моделях с нитрометановым двигателем используется один сервопривод для управления дроссельной заслонкой и торможением; вращение сервопривода в одном направлении приведет к открытию дроссельной заслонки на карбюраторе , обеспечивая подачу большего количества воздуха и топливной смеси в двигатель внутреннего сгорания . Вращение сервопривода в другом направлении вызывает приложение крутящего момента к рычажному механизму и кулачку, что вызывает трение с тормозным материалом. Тормоз обычно расположен на приводном валу или в некоторых случаях прямозубой шестерне и применяет тормозное усилие только к ведомым колесам. Некоторые модели также будут использовать дополнительный сервопривод для управления коробкой передач, позволяющий автомобилю двигаться задним ходом.
Размеры топливных двигателей чаще всего находятся в диапазоне 0,12–0,35 кубических дюймов (2,0–5,7 см 3 ). Это связано с ограничениями основных санкционирующих органов на радиоуправляемые гонки. Многие «запрещенные» двигатели производятся больше, чем они, в основном предназначены для транспортных средств, которые не будут использоваться в санкционированных гонках и, следовательно, не должны соответствовать этим правилам. Объем двигателя относится к классу автомобиля; Транспортные средства масштаба 1/10 на и внедорожники обычно оснащены двигателями от 0,12 до 0,18 кубических дюймов, а автомобили масштаба 1/8 используют двигатели от 0,21 до 0,32 кубических дюймов. Есть исключения: многие модели Schumacher и Thunder Tiger / Team Associated RC являются хорошими примерами необычно больших двигателей, которые входят в стандартную комплектацию некоторых моделей.

Двигатели, работающие на топливе, позволяют моделям развивать умеренные скорости без изменений. Максимальная мощность обычно достигается на средних и высоких скоростях, и следует ожидать немного более медленного отклика дроссельной заслонки, чем у автомобилей с электрическим приводом, из-за сцепления и отсутствия крутящего момента. Электродвигатели эффективно создают мгновенный крутящий момент, в то время как нитродвигатели, как и полноразмерные бензиновые двигатели, требуют времени, чтобы двигатель набрал обороты и сцепление включилось. Автомобили, работающие на нитро- (и топливном) топливе, можно заправить и вернуть в действие за несколько секунд, в отличие от электромобилей, которые требуют снятия корпуса и креплений аккумулятора для замены разряженного аккумулятора. Автомобили Nitro охлаждаются одним воздухом, а некоторые маслом, смешанным с топливом, и могут работать непрерывно без необходимости делать перерывы для охлаждения, если они правильно настроены.
Автомобили с азотным двигателем работают как полноразмерные транспортные средства, работающие на топливе, больше, чем их электрические аналоги, и в них используется двухтактный двигатель, а не электродвигатель . Звук шума двигателя — главный аргумент в пользу энтузиастов нитро, хотя бесщеточные электрические эквиваленты обычно быстрее и не требуют специального топлива. Однако их выхлопные газы содержат несгоревшее масло, которое обычно покрывает шасси. Это, в свою очередь, требует большей очистки, чем аналог с электрическим приводом. Для очистки обычно используются сопла для сжатого воздуха и растворители (например, денатурированный спирт ). Настройка транспортного средства, работающего на топливе, требует обучения, чтобы поддерживать оптимальную производительность и экономию топлива, а также минимизировать износ и перегрев двигателя даже в автомобилях, готовых к эксплуатации. Работа нитротопливного двигателя без настройки или неправильной настройки может снизить производительность в богатых условиях и вызвать серьезные повреждения в условиях бедной смеси.
Из-за их способности двигаться в течение более длительных периодов времени и использования горящего топлива механический износ нитротранспортных средств обычно выше, чем у электромобилей. Кроме того, увеличенный вес транспортных средств, работающих на топливе, обычно приводит к столкновениям на более высоких скоростях, вызывая больший ущерб столкнувшимся транспортным средствам, и необходимо учитывать большую степень проблем безопасности. Техническое обслуживание, такое как очистка воздушного фильтра и общая очистка шасси, замена изношенных деталей сцепления, надлежащая смазка после прогона (необходима для хранения) и техническое обслуживание других элементов, связанных с двигателем, таких как замена свечей накаливания, делает первый опыт более неприятным. время пользователей RC. Кроме того, нитромоторы обычно требуют восстановления или замены после того, как через них пройдено 2–8 галлонов (7–30 литров) топлива, из-за потери компрессии, которая может быть ускорена из-за плохой настройки и перегрева. Также возможно серьезно повредить двигатели, если разогнать их без нагрузки или попасть в карбюратор. Таким образом, автомобили с азотными двигателями по своей природе дороги в обслуживании.
Бензиновые модели
Бензиновые автомобили, также известные как «заправщики» или «заправщики», работают на смеси бензина и масла. Они стоят намного дороже (обычно 800–3000 долларов США), чем нитро- и электромобили. Они также намного больше, обычно масштаб 1/6 или 1/5, обычно называемый крупномасштабным, и поэтому для их работы требуется гораздо больше места. У них обычно не такая высокая максимальная скорость (по сравнению с нитро и некоторыми электрическими двигателями), но они обладают большой мощностью и не требуют большого количества топлива для работы. Со временем стоимость бензинового автомобиля может быть меньше, чем у некоторых автомобилей с нитро-двигателем из-за высокой стоимости нитротоплива и покупки новых нитродвигателей для замены изношенных. Кроме того, газовые двигатели редко, если вообще когда-либо, требуют настройки и имеют очень долгий срок службы. Эти газовые автомобили действительно подходят тем, кого больше интересуют масштабы, чем воображение. Эти крупномасштабные модели были популярны в Европе более десяти лет такими брендами, как FG Modelsport, MCD, Elcon, NRP, и стали популярными в США благодаря таким компаниям, как HPI Racing и Losi, производящим доступные высококачественные модели на местном уровне. В Европе есть санкционированные гонки EFRA, которые соревнуются как на внедорожниках, так и на внедорожниках, чтобы определить национальных чемпионов, а также европейских чемпионов, в США ROAR еще не признал их официальными классами.
Аксессуары и обновления
Большинство моделей RC обычно требуют приобретения дополнительных аксессуаров. Для электромобилей необходимы аккумуляторные батареи и подходящее зарядное устройство , которые редко входят в комплект поставки. Паяльник и расходные материалы часто необходимы для создания высокопроизводительных аккумуляторных блоков или установки модернизированной электроники с разъемами с низким сопротивлением. Литий-полимерная батарея в жестком корпусе популярна для радиоуправляемых машин, при этом наиболее распространенные напряжения составляют 7,4 В или 11,1 В. Известно, что литий-полимерные батареи взрывоопасны при неправильном обращении, поэтому некоторые энтузиасты по-прежнему используют вместо них никель-металлгидридные батареи, которые менее мощны. но безопаснее. Для транспортных средств с нитроэнергетическим двигателем для запуска двигателя необходимы нагреватель свечи накаливания и топливо, а также 4 батареи размера AA или перезаряжаемый шести-вольтовый пятиэлементный аккумулятор для питания бортовой электроники. Автомобили с нитро-двигателем также нуждаются в средствах для проворачивания двигателя, что может быть достигнуто с помощью ручного запуска, стартера, роторного запуска с батарейным питанием или электродрели. Автомобили Traxxas nitro rc поставляются с системой ручного запуска, которая запускает двигатель и запускает его. Это не требует системы запуска от руки. Также необходимы относительно дорогое модельное топливо, запасные свечи накаливания и масло для инерции. Транспортным средствам с бензиновым двигателем требуется только аккумуляторная батарея приемника и средство для запуска двигателя, обычно включенное в комплект. Автомобили для хобби почти всегда требуют 8 батареек размера AA для питания передатчика, хотя некоторые могут использовать перезаряжаемый блок передатчика или просто перезаряжаемые батареи AA.
Крупная отрасль производителей послепродажного обслуживания выпускает детали для апгрейда или замены для автомобилей любительского уровня. Обновления варьируются от простых улучшений до долговечности автомобильных запчастей с дистанционным управлением до полного повышения производительности. Некоторые любители создают свои собственные улучшения для продажи через объявления и онлайн-форумы. Любители предпочитают модернизировать автомобили для хобби с пластиковых стандартных деталей на алюминиевые, чтобы увеличить прочность и угол поворота автомобиля.
Принцип действия

Радиоуправляемые автомобили используют общий набор компонентов для управления и эксплуатации. Для всех автомобилей требуется передатчик с джойстиками для управления или в форме пистолетной рукоятки, спусковой крючок для дроссельной заслонки и колесо для поворота, а также приемник, который находится внутри автомобиля. Приемник преобразует радиосигнал, передаваемый от передатчика, на подходящие электрические сигналы управления для других компонентов системы управления. Большинство радиосистем используют амплитудную модуляцию радиосигнала и кодируют контрольные позиции с помощью широтно-импульсной модуляции . Доступны модернизированные системы радиосвязи, в которых используется более надежная частотная модуляция и импульсно-кодовая модуляция . Однако в последнее время радиоприемники с частотой 2,4 ГГц стали стандартом для радиоуправляемых автомобилей любительского уровня. Радио подключено к электронным регуляторам скорости или сервомеханизмам (сокращенно «серво» в обычном использовании), которые выполняют такие действия, как управление дроссельной заслонкой, торможение, рулевое управление, а на некоторых автомобилях — включение передач переднего или заднего хода. Электронные регуляторы скорости и сервоприводы управляются приемником посредством широтно-импульсной модуляции; Длительность импульса устанавливает либо величину тока, которую электронное управление скоростью позволяет протекать в электродвигатель, либо устанавливает угол поворота сервопривода. На этих моделях сервопривод прикреплен как минимум к рулевому механизму; вращение сервопривода механически преобразуется в силу, которая управляет колесами модели, как правило, с помощью регулируемых тяг. Сервоприводы встроены во все рулевые тяги и некоторые нитро-дроссельные тяги. Сервопривод — это гибкое звено между сервоприводом и его рычажным механизмом, которое защищает внутренние шестерни сервопривода от повреждений во время ударов или напряжения.
История


Ранние коммерческие продукты
К середине 1966 года было доступно несколько ранних коммерчески жизнеспособных автомобилей с радиоуправлением, произведенных итальянской компанией El-Gi (Elettronica Giocattoli) из Реджо-Эмилии. Их первая модель, 1:12 Ferrari 250LM, была доступна в Великобритании в декабре 1966 года через импортеров Motor Books and Accessories, Сент-Мартинс, Лондон, а в начале 1967 года — через модельный магазин Atkinson в Суонси. За этой моделью последовал 1:10 Ferrari P4 Эль-Ги, впервые показанный на Миланской ярмарке игрушек в начале 1968 года. Автомобили с дистанционным управлением стали возможны примерно в это время исключительно благодаря развитию «пропорционального» радиоуправления. Раньше все радио были типа «бах / бах», то есть рулевое управление было либо влево, либо по центру, либо вправо, а скорость была либо стоп, либо вперед. Это можно было использовать для самолетов или лодок, но не для автомобилей.
В середине-конце 1960-х годов британская компания Mardave, базирующаяся в Лестере, начала производить коммерчески жизнеспособные радиоуправляемые автомобили. Их первыми автомобилями были автомобили, работающие на нитро- или газе, которые продавались в этом районе в начале 1970-х годов.
В начале 1970-х годов небольшие фирмы в США создали несколько коммерческих продуктов. Большинство из этих компаний начинали как компании по производству игровых автоматов, а с падением популярности этого жанра перешли в сферу радиоуправления. Среди них были Associated Electrics, Thorp, Dynamic, Taurus, Delta и Scorpion. Эти ранние машины представляли собой алюминиевые плоские алюминиевые автомобили с нитро-двигателем в масштабе 1/8 (тогда называемые газом) с двигателем 0,21 или меньше. Кузова этих автомобилей были изготовлены из поликарбоната (наиболее популярно из лексана). Самым популярным двигателем был K&B Veco McCoy. Основным органом, санкционировавшим гонки для этих автомобилей, были дистанционно управляемые автогонщики (ROAR). В 1973-74 годах компания Jerobee из штата Вашингтон создала свой нитро-автомобиль 1/12 с двигателем Cox 0,049. Было продано более 54 000 «готовых к работе» с системой радиоуправления, из которых 25 000 были произведены компанией EK Product od Texas, а остальная часть — компанией JoMac, когда они купили компанию у Rocket Research Corp. Несколько компаний послепродажного обслуживания создали запчасти для этого автомобиля, включая прозрачный Lexan. корпуса, радиаторы и топливные баки большего размера. Эта шкала превратилась в электрические гонки в масштабе 1/12, когда Associated Electrics создали RC12E в 1976-77 годах. Jerobee превратился в Jomac и создал свой собственный электрический комплект под названием Lightning 2000, который выиграл национальный чемпионат «ROAR» в 1981 и 82 годах в модификациях с 6 элементами и 82 в классах производства с 6 элементами. Lightning 2000 был разработан Доном Маккеем и Джоном Конгдоном.
К концу 1970-х годов интерес к электрическим гонкам в масштабе 1/12 начал расти, поскольку гонщики IC в масштабе 1/8, единственная гоночная категория в то время, должны были участвовать в гонках всю зиму в качестве альтернативы их непрактичным автомобилям IC, начали участвовать в гонках 1. / 12 автомобилей, поэтому была разработана зимняя национальная серия. В результате серия стала популярной, так как на этих встречах стало появляться большое количество собранных с нуля автомобилей. Опять же, электрические радиоуправляемые автомобили стали возможными благодаря одной революционной разработке — аккумуляторной батарее nicad. До середины 1970-х батареи были либо тяжелыми свинцово-кислотными, либо дорогостоящими одноразовыми сухими элементами. В 1976 году японская фирма Tamiya , известная своими детально проработанными наборами моделей из пластика, выпустила серию элегантных и детализированных, но механически простых моделей электрических дорожных автомобилей, которые продавались как «подходящие для радиоуправления». Наборы и радиосистемы, хотя и были довольно дорогими, продавались быстро. Вскоре Tamiya начала производить больше специализированных моделей автомобилей с дистанционным управлением и первой выпустила внедорожные багги с настоящими системами подвески. Именно этот переход к классу внедорожников вызвал большую популярность хобби, поскольку это означало, что радиоуправляемые автомобили больше не ограничивались битумом и гладкими поверхностями, а могли управляться практически где угодно. Первыми настоящими внедорожниками Tamiya были Sand Scorcher и Rough Rider , выпущенные в 1979 году, и оба основывались на реалистичной конструкции багги-багги. Tamiya продолжала производить все больше и больше внедорожников с работающими подвесками, более мощными двигателями, текстурированными резиновыми шинами для бездорожья и различными стилизованными кузовами « багги-багги ». Они также производили грузовики, такие как Toyota HiLux Pickup, которые отличались реалистичными трехступенчатыми коробками передач и системами подвески с листовыми рессорами. Все эти модели были реалистичными, прочными, легко собираемыми, модифицируемыми и простыми в ремонте. Они были настолько популярны, что в начале и середине 1980-х годов они стали причиной бума радиоуправляемых моделей автомобилей, и стали основой сегодняшнего рынка радиоуправляемых автомобилей. Популярные модели Tamiya включали багги Grasshopper и Hornet, а также модели грузовиков-монстров Blackfoot и Clodbuster . Самые ранние модели Tamiya, особенно ранние внедорожники, сейчас пользуются большим спросом у коллекционеров старинных радиоуправляемых автомобилей и могут продаваться по цене до 3000 долларов США на интернет-аукционах, если они еще в неношеном, незавершенном виде. Признавая их неизменную популярность, некоторые из ранних наборов были даже переизданы Tamiya в течение 2005–2007 годов с некоторыми изменениями.
Британская фирма Schumacher Racing в 1980 году первой разработала регулируемый шаровой дифференциал , который позволял практически неограниченно настраиваться для различных условий трассы. В то время большинство дорожных автомобилей имели неразрезной мост, а внедорожники обычно имели дифференциал зубчатого типа. Компания Team Associated последовала их примеру, представив в 1984 году бензиновый дорожный автомобиль RC100 масштаба 1/8, дорожный электромобиль RC12 масштаба 1/12 и гоночный внедорожный электрический гоночный багги RC10 масштаба 1/10 (см. Ниже). Команда Losi представила JRX2 в 1988 году.
Современные разработки в радиоуправляемых гонках

В 1984 году компания Associated Electrics, Inc. из Коста-Меса, штат Калифорния, представила внедорожный электрический гоночный автомобиль RC10 ; эта модель была отходом от обычной линейки дорожных гоночных автомобилей Associated Electrics, работающих на нитрометане. Разработанный как высококачественный радиоуправляемый автомобиль, шасси багги RC10 было изготовлено из анодированного авиационного алюминиевого сплава . В амортизаторы были подвергнуты механической обработке, и полностью перестраиваемый маслонаполненный; они также были изготовлены из того же алюминиевого сплава. Рычаги подвески были изготовлены из ударопрочного нейлона , как и трехсекционные колеса .
Дополнительные металлические экранированные шарикоподшипники иногда включались в колеса и трансмиссии RC10 . Трансмиссия RC10 содержала инновационный дифференциал с упрочненными стальными кольцами, прижатыми к шарикам, что делало ее почти бесступенчатой для любой дорожки. RC10 быстро стал доминирующей моделью в гонках по бездорожью.
В 1986 году компания Schumacher Racing Products выпустила свой автомобиль CAT (Competition All Terrain), который широко считался лучшим полноприводным гонщиком для бездорожья того времени. CAT выиграл чемпионат мира по бездорожью 1987 года. Этому автомобилю приписывают пробуждение интереса к гонкам по бездорожью с электроприводом на четыре колеса.
Гил Лози-младший, семья которого управляла ипподромом Ranch Pit Shop R / C в Помоне, Калифорния , направил свое обучение в колледже на инженерное дело, в первую очередь в области литьевых пластмасс, что привело к его основанию Team Losi. Когда JRX-2 , первый багги Team Losi, был выпущен, он положил начало соперничеству с Team Associated, которое продолжается и по сей день. Команда Losi продолжал обеспечить ряд достижений, в которую вошли первый в отрасли все природные резиновые шины, первый американский производством четыре колеса-диска гонка багги, и совершенно новый класс автомобилей, 1/18 масштаб Mini -Т внедорожная электрика.
Хотя Losi и Associated, казалось, доминировали на большей части американского рынка, Traxxas (другая американская компания, известная своими T-MAXX и REVO 3.3) и Kyosho (из Японии) также производили конкурентоспособные полноприводные внедорожники. модели шоссейных гонок. Хотя Losi и Associated были близкими конкурентами в США, внедорожные модели Schumacher продолжали оставаться популярными среди европейских любителей.
Электрические и нитро-автомобили прошли долгий путь с точки зрения мощности. Электромобили прошли путь от не подлежащих ремонту щеточных двигателей и никель-кадмиевых батарей до бесщеточных двигателей и LiPo . Автомобили Nitro прошли путь от небольших двигателей до огромных двигателей 0,36–0,80, которые используются в больших грузовиках-монстрах.
Телеметрия в радиоуправляемых гонках
В последние несколько лет односторонняя система телеметрии также применялась в гоночных радиоуправляемых автомобилях для получения информации с помощью датчиков автомобиля, таких как
- Обороты двигателя
- Обороты двигателя
- вольтаж
- Температура двигателя
- Температура двигателя
Система телеметрии обычно интегрируется в приемник автомобиля, а затем передает данные на контроллер.
Источник Источник http://m.habr.com/ru/post/469733/
Источник Источник http://m.habr.com/ru/post/469733/
Источник http://ru.qaz.wiki/wiki/Radio-controlled_car