Автомобильный справочник
для настоящих любителей техники
Электронная архитектура в автомобилестроении
В связи с ростом требований к безопасности, комфорту, уровню развлечений и охране окружающей среды электронные системы в автомобилях получают все больше функций и характеризуются высоким уровнем сложности. Для сохранения этого уровня в будущем требуются самые современные технологии, методы и инструменты системной архитектуры. Вот о том, как выглядит современная электронная архитектура в автомобилестроении, мы и поговорим в этой статье.

История развития электронной архитектуры автомобиля
На протяжении многих десятилетий в истории автомобилестроения использовалось совсем небольшое количество электрических систем: зажигание, освещение, стеклоочистители, звуковой сигнал, датчик уровня топлива, различные индикаторы и радиоприемник. Полупроводники — за исключением радиоприемников — изначально использовались только для выпрямления (генератор постоянного тока был заменен генератором переменного тока лишь в 1963 году) и затем для электронного управления (транзисторное зажигание появилось в 1965 году).
Реализовать некоторые автомобильные функции электромеханическими средствами и дискретными электронными компонентами либо не удалось вовсе, либо удалось лишь при несопоставимо высокой сложности. К примеру, первая электронная антиблокировочная система (ABS) была разработана еще в 1970 году, но так и не дошла до серийного производства из-за своего размера, массы и стоимости. К середине 70-х годов развитие интегральных схем для широкого спектра областей применения дошло и до автопрома и вызвало революционные изменения в автомобильной электронике.
Один из первых примеров объединения электронных систем в сеть появился при разработке системы управления тяговым усилием (TCS). Это объединение в сеть было изначально реализовано чисто механическими средствами. Дроссельная заслонка в воздухозаборной системе ДВС была оснащена устройством, которое можно было активировать непосредственно через систему управления тяговым усилием. Системе управления двигателем было невозможно распознать, чем вызвано перемещение дроссельной заслонки — нажатием педали газа или вмешательством системы управления тяговым усилием.
Следующим этапом стала реализация электронного подключения к блоку управления двигателем через интерфейс ШИМ (широтно-импульсной модуляции) для улучшения динамической реакции. Его можно было использовать для передачи сигнала на блок управления двигателем для уменьшения крутящего момента двигателя. Тогда оно было реализовано в виде дросселирования подачи воздуха, уменьшения впрыска или опережения момента зажигания.
Из-за постоянного ужесточения требований к составу отработавших газов те возможности, что имелись на момент соединения системы управления тяговым усилием и системы управления двигателем были уже недостаточны. Теперь требовалось сообщить системе управления двигателем, как уменьшение крутящего момента, запрашиваемое системой управления тяговым усилием, осуществляется в воздушном, топливном каналах или цепи зажигания. Поэтому было необходимо создать более мощный интерфейс, через который система управления тяговым усилием могла бы передать системе управления двигателем запрос на необходимый крутящий момент и динамическую реакцию. I/I наоборот, фактический момент, обороты двигателя и резерв настройки тока должны были передаваться на блок управления TCS. Это оказалось сложно и дорого в плане количества проводов, необходимых для передачи этих разных данных через дискретные и, к примеру, ШИМ-интерфейсы. Система шин CAN (сеть контроллеров) была представлена в 1991 году в качестве альтернативы дискретным проводам. Так был заложен фундамент для современного объединения автомобильных систем в сеть.
Электронная архитектура сегодня
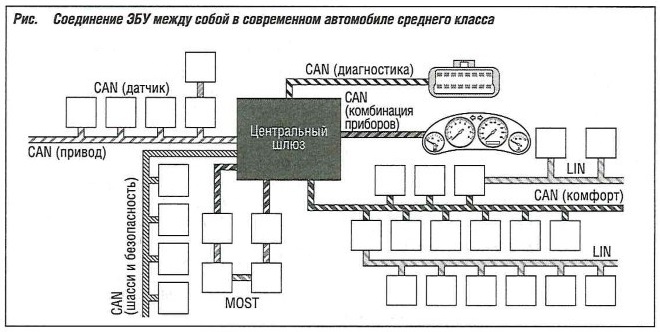
В современных автомобилях практически все ЭБУ прямо или косвенно (например, через шлюзы) соединены друг с другом (рис. » Соединение ЭБУ между собой в современном автомобиле среднего класса» ). Объединение в сеть дошло до того, что 60 и более ЭБУ общаются между собой по нескольким шинам CAN и другим шинам — FlexRay, MOST (транспорт для медиа ориентированных систем) и LIN (локальная сеть взаимодействия). Так, например, блок управления системы динамической стабилизации (ESP) передает в сеть информацию о скорости автомобиля. Автомобильный радиоприемник может использовать эту информацию, к примеру, для адаптации громкости к скорости автомобиля.
Благодаря объединению ЭБУ в мощную сеть можно реализовать множество новых функций без какого-либо дополнительного оборудования, т.е. исключительно путем обмена данными и с помощью программного обеспечения. Одним из примеров служит открывание дверных окон путем более длительного нажатия кнопки на брелоке дистанционного управления. Таким образом, например, можно равномерно вентилировать салон летом, когда открываются двери. Для этого блоки стеклоподъемников и система центрального запирания обмениваются необходимой информацией. Программное обеспечение запускается либо на ЭБУ системы центрального запирания, либо на ЭБУ стеклоподъемников. Во многих автомобилях эти две системы имеют общий ЭБУ, в этом случае новые программные функции можно реализовать даже еще проще.
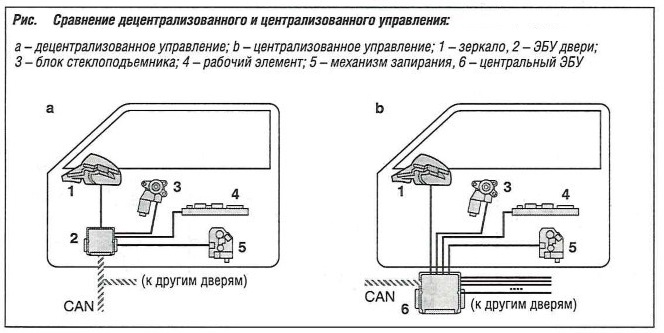
Это демонстрирует тенденцию, изначально встречавшуюся в кузовной электронике: интеграция отдельных ЭБУ с образованием центрального ЭБУ (рис. «Сравнение децентралихованного и централизованного управления» ). Эти центральные ЭБУ соединяются с датчиками и исполнительными механизмами либо через дискретные, аналоговые провода, либо через шины. Последние значительно уменьшают количество штырьков в разъеме ЭБУ и, соответственно, стоимость проводки. Датчики и исполнительные механизмы, подключаемые через шины, также называют «интеллектуальными». Для подключения к шине они должны иметь электронную схему, которая во многих случаях также включает в себя функции кондиционирования сигнала датчика или функции драйвера исполнительного органа. Но в то же время использование электронной схемы означает рост затрат на датчики и исполнительные механизмы. Таким образом, минимизация суммарных затрат, в том числе на электронику и провода, является важной задачей при определении концепций организации сети.
К примеру, логическая цепь для функции защиты пальцев у блоков стеклоподъемников во многих исполнениях расположена прямо в ЭБУ на электроприводе стеклоподъемника. Сигнал активации нормальной работы, например, при упомянутом выше открывании стекол с брелока, передается по шине LIN с центрального ЭБУ кузовной электроники (ВСМ). В этом отношении речь идет о серверной архитектуре.
Тенденции развития электронной архитектуры
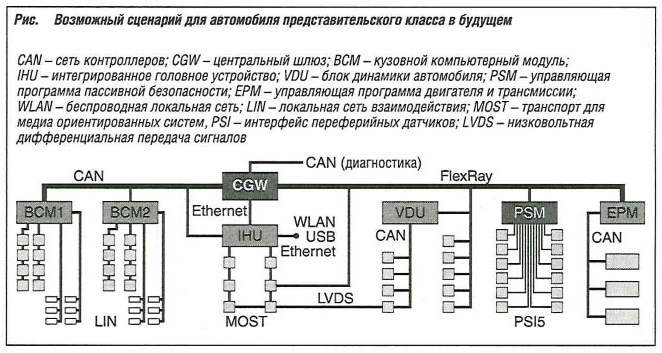
Упомянутая выше централизация и использование интеллектуальных датчиков и исполнительных механизмов в области кузовной электроники нашла распространение в других функциональных областях автомобиля (информация для водителя, динамика движения и безопасность) и продолжит расширяться в ближайших поколениях автомобилей. В дополнение к комбинации функций различных ЭБУ в одном центральном ЭБУ используются локальные главные компьютеры (рис. «Возможный сценарий для автомобиля представительского класса в будущем» ).
ЭБУ интеллектуальных датчиков и исполнительных органов автомобиля зависят от этих главных компьютеров (ВСМ, IHU и т.д.). Функции, требующие высокой степени интеграции команд управления информацией в основном воспроизводятся на этих главных компьютерах в программном обеспечении. Чтобы эти функции могли работать и на ЭБУ других платформ, требуется стандартная программная архитектура. Добиться этого можно посредством инициативы AUTOSAR (см. раздел «AUTOSAR» ниже).
Архитектура электронных систем автомобиля
С увеличением количества электроники в автомобиле растет и потребность в мощных процессах разработки и методах их описания для архитектуры электрических и электронных систем.
Понятие «архитектура» обычно обозначает искусство строительства. В строительстве архитектор проектирует здание, создавая чертежи в различных проекциях, и строители-подрядчики выполняют работу в соответствии с пожеланиями заказчика и граничными условиями. Проект абстрагируется от реальности в плане конкретных аспектов (например, геометрических условий или электропроводки). Здание может быть возведено окончательно на основании проектов всех необходимых аспектов.
Применительно к автомобилям это называется «Е/Е-архитектурой». «Е/Е» означает электрические и электронные аспекты автомобиля. «Проекты» Е/Е-архитектора в дальнейшем мы будем называть общим понятием «модель».
У автопроизводителей и их поставщиков разные взгляды на то, сколько и каких моделей требуется для полного описания электрических и электронных систем автомобиля. Представленные ниже модели хорошо зарекомендовали себя на практике и являются необходимой основой для описания объема Е/Е-архитектуры.
Понятие архитектуры часто используется в литературе и публикациях для обозначения самих моделей. Здесь четко различают рабочую операцию (разработка архитектуры) и представление результата (модель).
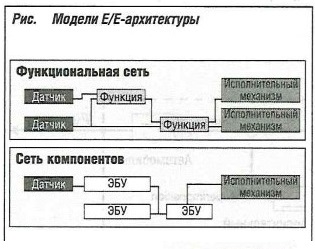
Модели Е/Е-архитектуры
Модели Е/Е-архитектуры отражают результаты различных аспектов интеграции электронных систем в автомобиле (рис. «Модели Е/Е-архитектуры» ). Эти аспекты обычно рассматриваются одновременно, так, как и геометрия (структура кузова) и новые системы анализируются на этапе разработки концепции. В процессе разработки автомобиля может возникнуть ситуация, когда электронная система в выбранной технологии не вписывается в имеющееся пространство. В этом случае нужно найти компромисс.
 |
 |
Функциональная сеть
Функциональные модели — предварительная стадия конкретных технических систем. Они описывают элементы, необходимые для реализации необходимых характеристик, не вдаваясь в конкретную технологию. На примере рулевого управления с наложением это означает разбивку на такие элементы, как:
- Переменное передаточное отношение;
- Управление стабилизацией;
- Модель автомобиля;
- Исполнительный механизм;
- Автомобиль;
- Водитель.
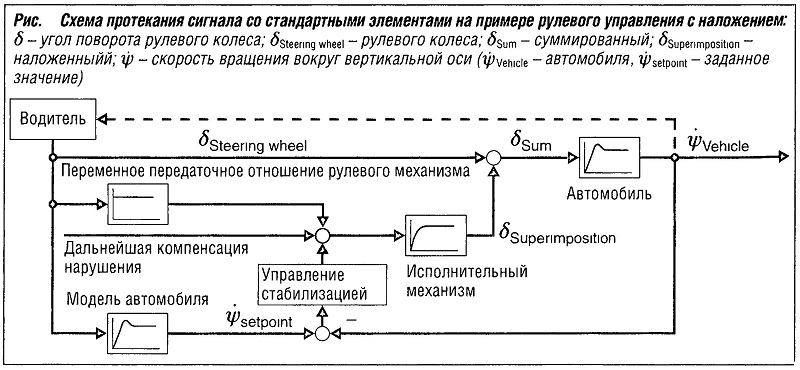
Функциональные модели (рис. «Схема протекания сигнала со стандартными элементами на примере рулевого управления с наложением» ) обычно создаются в виде схемы прохождения сигналов по DIN 19226.
Сеть компонентов
Технологическая модель
Технологическая модель описывает, какая техническая реализация используется для указанных элементов без объединения их в модули, такие как электронные блоки управления (ЭБУ). Создаются «технологические блоки».
Таким образом, фильтрацию сигналов можно реализовать с дискретными компонентами с помощью цифровой цепи или фильтрующего программного обеспечения в микроконтроллере. С помощью цифровой цепи или микроконтроллера можно даже реализовать функцию контроллера. Стабилизации напряжения можно добиться либо с помощью сглаживающего конденсатора, либо конвертера напряжения DC/DC.
На выбор технической реализации с одной стороны влияет функция, а с другой — затраты. Прежде чем сгруппировать технологические блоки в модули в виде ЭБУ, первым делом нужно попытаться найти синергизм с технологическими блоками, интегрируемыми в будущем. Создается технологическая активная цепь (рис. «Пример технологической активной цепи» ). Если, к примеру, имеется конкретная сенсорная технология для звена активной цепи, сигнал которого нужен другой активной цепи, то она тоже будет использоваться. Это происходит даже при переопределении этого датчика под дополнительного пользователя, т.е. при менее строгих требованиях, например, к дальности приема сигналов или к точности.
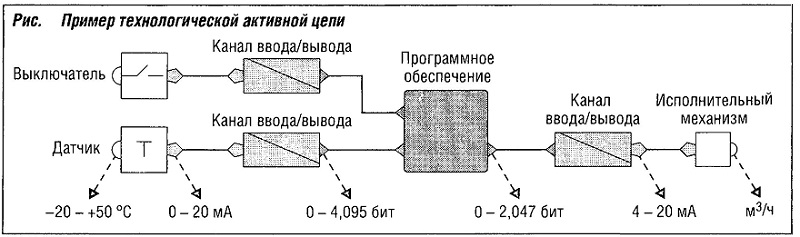
Вместе с тем, важно хранить исходное требование в базе данных, так как этого синергизма может не оказаться в другом автомобиле.
В автомобильной промышленности для описания оборудования обычно используется номенклатура по DIN EN 60617.
Узловая модель
Звенья технологических активных цепей объединяются в группы в различных местах, называемых узлами. Здесь поддерживается строгое соблюдение оптимальных затрат на интеграцию технологических блоков. Например, делаются попытки интеграции программных частей нескольких технологических активных цепей на общем микроконтроллере. Там, где это возможно, используются сигналы датчиков и исполнительные механизма. Но история показывает, что замечательного синергизма можно добиться даже в области механики — например, в создании вакуума для пневматического усилителя тормозов через впускной трубопровод двигателя с искровым зажиганием.
Аппаратная модель ЭБУ
Эта модель описывает структуру электронного оборудования ЭБУ. Она создается путем отнесения конкретных электронных компонентов из технологических активных цепей электронному модулю в узле. Поэтому ЭБУ, вообще говоря, является сборным пунктом электронных компонентов различных систем, «интеграционной платформой».
Программное обеспечение для управления различными системами из различных источников (автопроизводителей или их поставщиков) интегрируется в микроконтроллеры, размещенные в ЭБУ. Путем объединения ЭБУ в сеть можно реализовывать сложные распределенные функции, использующие датчики и исполнительные механизмы из различных мест установки в автомобиле.
На стадии разработки для электрических и электронных компонентов ЭБУ изначально используются традиционные электрические схемы. Затем определяется механика ЭБУ, дизайн и технология подключения. Модель на ранней стадии разработки ограничивается очень грубым представлением.
Программная модель ЭБУ
Из классической информационной технологии (для систем персональных компьютеров) имеется несколько признанных методов разработки архитектуры программного обеспечения с соответствующими моделями (например, Product Line Approach). Однако до сих пор не было разработано стандарта на разработку архитектуры программного обеспечения в автомобилестроении. С появлением стандарта AUTOSAR архитектура программного обеспечения в автомобиле в настоящее время определяется непосредственно.
Стандарт AUTOSAR определяет структуру программного обеспечения близко к уровню аппаратной части и интерфейсы между функциями приложений (рис. «Изображение архитектуры AUTOSAR» ). Кроме того, AUTOSAR определяет стандартизированные форматы обмена, поддерживаемые популярными инструментами моделирования.
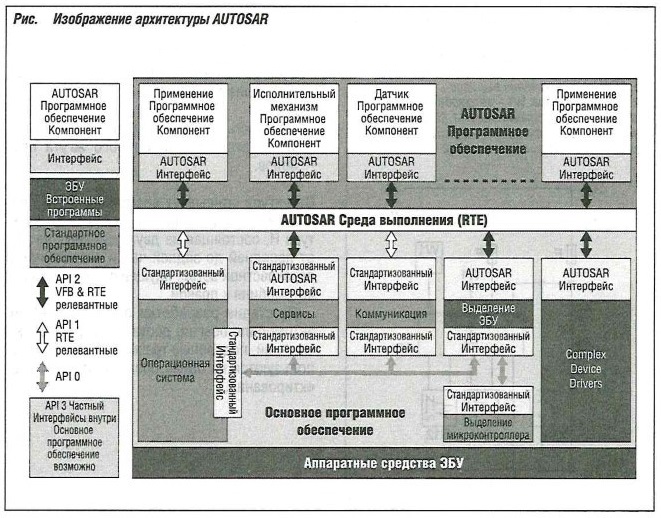
Различают базовое и прикладное программное обеспечение. Блоками базового программного обеспечения являются, например, драйверы устройств, программное обеспечение для связи, операционная система и аппаратная абстракция.
Сетевая модель связи
Поскольку все технологические блоки автомобиля на предыдущих этапах были распределены между ЭБУ, мы получаем сеть этих ЭБУ с их коммуникационными взаимосвязями. Сетевая модель связи представляет все ЭБУ в автомобиле, подключенные к шине и, соответственно, прямо или косвенно соединенные друг с другом.
Каждый сигнал, передаваемый между двумя или несколькими ЭБУ, относится к подходящей шинной системе. В этом плане AUTOSAR определяет стандартизированные форматы обмена, позволяющие описать связь по шине. Формат обмена AUTOSAR, начиная с версии 3.0, содержит стандарт ASAM FIBEX.
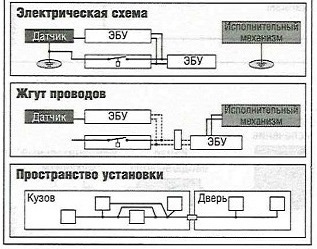
Электрическая схема
 Отнесение технологических блоков к ЭБУ и модулям датчиков и исполнительных механизмов также привело к появлению сети электрических нагрузок/потребителей, требующей подходящего энергоснабжения. С одной стороны, важно защитить отдельные электрические цепи, чтобы короткое замыкание не повлияло на всю сеть. С другой стороны, не на все цепи, должна подаваться электроэнергия в каждом рабочем режиме.
Отнесение технологических блоков к ЭБУ и модулям датчиков и исполнительных механизмов также привело к появлению сети электрических нагрузок/потребителей, требующей подходящего энергоснабжения. С одной стороны, важно защитить отдельные электрические цепи, чтобы короткое замыкание не повлияло на всю сеть. С другой стороны, не на все цепи, должна подаваться электроэнергия в каждом рабочем режиме.
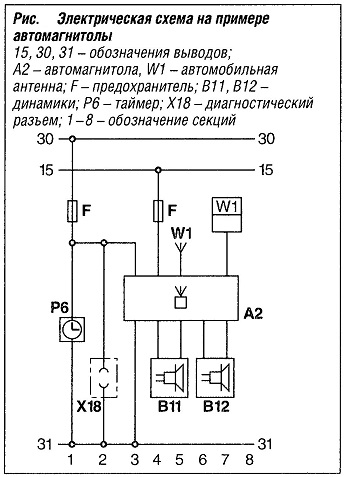
Для этого был введен принцип «выводов». К примеру, на вывод 15 электроэнергия подается только при включении зажигания.
Электрическая схема (рис. «Электрическая схема на примере автомагнитолы» ) показывает электрическое соединение и защиту предохранителями отдельных модулей без учета монтажного положения. Здесь можно увидеть цвета проводов (на рисунке не показаны) и соответствие выводу или предохранителю. Выводы обозначаются по DIM 72552.
Плюс напряжения питания обычно изображается в верхней половине, а минус (масса) — в нижней.
Жгут проводов и пространство установки
Эта модель группирует электрические и электронные модули в определенном месте в автомобиле (рис. «Пример двухмерной пространственной модели» ). 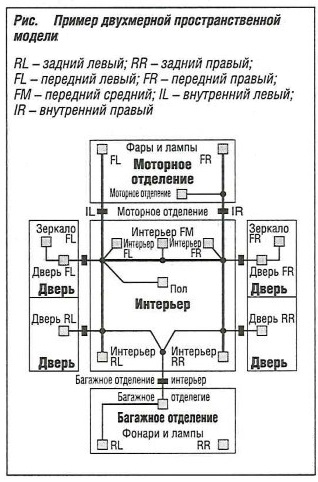 Таким образом, провода, соединяющие между собой ЭБУ, и провода питания нагрузок/потребителей сводятся вместе на станках для скрутки жгутов. Так получаются жгуты проводов. Здесь необходимо соблюдать множество разных граничных условий:
Таким образом, провода, соединяющие между собой ЭБУ, и провода питания нагрузок/потребителей сводятся вместе на станках для скрутки жгутов. Так получаются жгуты проводов. Здесь необходимо соблюдать множество разных граничных условий:
- Концепция изготовления (одно- или многосоставный жгут проводов);
- Поперечные сечения (гибкость);
- Электромагнитная совместимость (ЕМС);
- Рассеяние тепла;
- Масса;
- Стоимость (например, меди);
- Устройство автомобильного жгута проводов.
Структура описывает возможные пути прокладки проводов в кузове, например, структура Н, состоящая из двух основных ветвей от передней до задней части автомобиля и перекрестной ветви, идущей с левой стороны автомобиля к правой.
На стадии разработки общей концепции автомобиля обычно достаточно двухмерны моделей; подробные трехмерные модели используются на более поздних стадиях проектирования.
Процесс разработки Е/Е-архитектуры
Процесс разработки Е/Е-архитектуры соединяет между собой отдельные стадии проектирования на логической и временной основе и обеспечивает критерии качества в начале и в конце стадии проектирования.
Поскольку Е/Е-архитектура для автомобилестроения — все еще молодая дисциплина, процессы у автопроизводителей и их поставщиков пока сильно разнятся. Это относится и к количеству, и последовательности стадий проектирования, и к критериям качества.
Управление требованиями
Требования решающим образом определяют действия Е/Е-архитектора. Рекомендуется различать функциональные и нефункциональные требования. Функциональные требования означают желаемые характеристики при эксплуатации автомобиля. Нефункциональные требования означают техническое решение и поэтому их также называют проектными ограничениями.
Таким ограничением может быть, например, свободное пространство в центральной консоли для установки ЭБУ. Другим ограничением может быть максимально допустимое рассеяние тепла в месте, которое влияет на размещенную там силовую электронику.
Таким образом, например, аудиоусилители часто устанавливаются в багажниках, так как тепло в области панели приборов не может адекватно рассеиваться.
После подготовки документации по функциональным и нефункциональным требованиям начинается фактическая разработка Е/Е-архитектуры.
Разработка Е/Е-архитектуры
Разработка Е/Е-архитектуры может идти двумя путями: по принципу «снизу-вверх», т.е. начиная с существующих компонентов, и по принципу «сверху вниз», т.е. с реализацией всех ранее описанных этапов моделирования, начиная с функциональных и нефункциональных требований.
Принцип «снизу-вверх», вовремя создания Е/Е-архитектуры, начиная с функциональности существующих компонентов, предусматривает дополнение этих компонентов функционально-коммуникативными аспектами и прохождение соответствующих этапов моделирования. Этот подход обычно выбирается для создания Е/Е-архитектур последующих поколений существующих автомобильных платформ.
Принцип «сверху вниз» фокусируется на сложности функций и обычно выбирается для создания Е/Е-архитектур новых автомобильных платформ.
Использование Е/Е-концепций позволяет обмениваться данными с партнерами- разработчиками электронных компонентов и жгутов проводов.
Оценка моделей
Для всех методов необходимо соблюдать следующее: при переходе от одной модельной иерархии к следующей (например, от функциональной модели к технологической), список критериев оценки (например, повторное использование или тестируемость) сравнивается с набором конкретных решений (например, шинных технологий). Оценка конкретных решений по критериям позволяет решению принять форму на основе чисто функциональных требований и неизбежных граничных условий (критерий «MUST»). Эту процедуру также называют QFD (Развертывание функции качества).
Альтернативная процедура заключается в сравнении опорного решения (например, предыдущей модели организации сети) с альтернативными с помощью критериев оценки.
Она дает поистине быстрые результаты, но не абсолютный оптимум.
Поскольку критерии оценки всегда взвешиваются автопроизводителями по-разному, электронные системы автомобилей иногда значительно различаются.
Инструменты разработки Е/Е-архитектуры
Для моделирования архитектуры идеально подходит инструмент, который может соединить между собой различные модели и уровни моделей Е/Е-архитектуры. Таким образом, создается полностью соединенная документация. Это позволяет реализовывать различные дисциплины, являющиеся частью процесса разработки, в нужных точках. Кроме того, должна обеспечиваться возможность числовой регистрации свойств моделирования, чтобы можно было обеспечить оценку.
Между тем на рынке появились различные инструменты для разработки Е/Е-архитектуры, позволяющие выполнять моделирование архитектуры с помощью инструментов. Важным моментом является стандартизация моделей и их форматов данных. Только это обеспечивает конкуренцию между изготовителями инструментов и открывает различным дисциплинам возможности для присоединения к процессу в разных точках.
Для будущего плавного перехода к конфигурации системы и ЭБУ с помощью технологий AUTOSAR требуется инструмент разработки Е/Е-архитектуры для поддержки форматов обмена AUTOSAR, таких как «Описание системы» и «Описание компонентов программного обеспечения». Поэтому мы остановимся на стандарте AUTOSAR более подробно.
AUTOSAR
Партнерство AUTOSAR (открытая системная архитектура для автомобилестроения) было учреждено в июле 2003 года автопроизводителями и их поставщиками. Его главной целью является совместная разработка открытой программной архитектуры для автомобильных приложений будущего. Цели партнерства включают в себя стандартизацию фундаментальной инфраструктуры ЭБУ (базовое программное обеспечение), форматов обмена и функциональных интерфейсов. Они призваны заменить существовавшие в компаниях индивидуальные решения. Для того чтобы успевать за постоянным усложнением систем, в связи с появлением новых функций, используются концепции и методы на базе моделей. Требования к качеству и надежности выполняются путем использования проверенных стандартов.
На основе программного обеспечения со стандартизированной инфраструктурой, состоящей, главным образом, из стандартных модулей, каждый автопроизводитель может реализовать свой контент (прикладное программное обеспечение).
Цели и концепции AUTOSAR
Стандарт AUTOSAR преследует следующие цели:
- Повторное использование программного обеспечения для разных ЭБУ, автомобильных платформ и автопроизводителей;
- Поддержка в интеграции программного обеспечения третьих лиц в области как базового, так и прикладного программного обеспечения;
- Поддержка смещения прикладного программного обеспечения между ЭБУ (статичная);
- Обмен стандартными аппаратными блоками (например, трансивер CAN) без изменений в прикладном программном обеспечении.
Программная архитектура, определяемая стандартом AUTOSAR (рис. 7), поддерживает четкое разделение между базовым и прикладным программным обеспечением. Это достигается несколькими абстрактными уровнями в базовом программном обеспечении — от драйверов устройств до сложных инфраструктурных сервисов и среды прогона (RTE) стандарта AUTOSAR.
Поскольку интерфейсы большинства модулей базового программного обеспечения в этих слоях стандартизированы, то стандартные аппаратные блоки и соответствующие драйверы можно заменить без изменения прикладного программного обеспечения.
И наоборот, прикладное программное обеспечение, ограничивающееся использованием этих стандартных интерфейсов, можно гораздо проще ввести в ЭБУ на стадии разработки и даже переместить в другой ЭБУ. Например, одно и то же прикладное программное обеспечение контроллера скорости автомобиля в зависимости от платформы автомобиля может работать на блоке управления двигателем, блоке управления трансмиссией или другом ЭБУ без изменения прикладного программного обеспечения. Для этого, естественно, требуется достаточно мощный ЭБУ и соответствующая организация сети.
Стандартизация базового программного обеспечения и возможность его конфигурации в зависимости от требований к прикладному программному обеспечению позволяет повторно использовать модули базового программного обеспечения для разных автомобильных платформ и автопроизводителей. Это повышает качество программного обеспечения, поскольку никаких изменений на Уровне продукта не происходит, сокращает затраты на разработку путем повторного использования и образует устойчивую основу. Для постоянного роста сложности и объединения функций приложений.
Партнерство AUTOSAR также разрабатывает концепции на базе моделей для раннего Утверждения проекта системы. На основе Формализованного описания выполняется проверка соответствия интерфейсов прикладного программного обеспечения друг другу, при этом прикладное программное обеспечение не обязательно должно быть в виде полной программы.
Перспективы развития электронных систем
С ростом количества и степени интеграции электронных систем необходимо использовать подходящие процессы, методы и инструменты при разработке Е/Е-архитектуры. Разработка Е/Е-архитектуры в автомобилестроении превратилась в независимую задачу и оказывает решающее влияние при разработке новых автомобилей. Если описанные здесь процедуры будут последовательно применяться и развиваться, то в будущем автомобильная электроника будет управляемой и продолжит вносить значительный вклад в улучшение потока перевозок, безопасности движения, повышение комфорта и экономичности.
Электроника в управлении системами автомобиля
ЭСУД — это электронная система управления двигателем. Так же, как существуют много разновидностей двигателей, также и существуют разные виды ЭСУД, устанавливаемые на все виды современных автомобилей серийного производства.
Принцип работы ЭСУД
Электронная система управления ДВС, он же компьютер принимает и считывает показатели с различных датчиков мотора и «говорит» исполнительным узлам и механизмам, что делать при таких полученных данных.
Цель существования ЭСУД — это постоянный подбор оптимального режима работы двигателя при котором создается оптимальная норма расхода топлива и выбросы выхлопных газов будут соответствовать требованиям современным стандартам экологов.
Разберем ЭСУД ВАЗ инжекторных модификаций
На российские автомобили ВАЗ устанавливаются электронные системы управления фирм Bosch, General Motors, отечественного производителя СУД.
Иностранного производства ЭСУД не ремонтируются, они не взаимозаменяемы и не ремонтопригодны. В российских ЭСУД можно заменить внутренние детали.

Классификация контроллеров управления мотором
На машины ВАЗ устанавливают следующие типы и виды контроллеров:
- Январь 5 (Россия);
- М 1.5.4 (Bosch);
- МР 7.0 (Bosch).
Эти виды контроллеров не взаимозаменяемы. Есть система с нейтрализатором, есть без. Для системы без нейтрализатора подходит М 1.5.4, но он не подойдет для системы с нейтрализатором.
Контроллер МР 7.0 для системы ЕВРО-2 не подходит для автомобиля с двигателем ЕВРО-3. Контроллер МР 7.0 для системы ЕВРО-3 можно установить для авто ЕВРО-2 только после перепрошивки программного обеспечения контроллера.
Системы впрыска делятся на:
- фазированные;
- не фазированные.
В не фазированных системах впрыск топлива происходит или одновременно всеми форсунками, или парами.
В фазированных системах впрыск топлива происходит форсунками последовательно.
Нормы токсичности
После создания транспортной техники, начали появляться нормы по защите окружающей среды. Стандарты по количествам выбросов выхлопных газов получили название ЕВРО-0, -1, -2, -3, -4, -5.
Автомобили с большой долей выбросов вредных веществ, то есть класса ЕВРО-0, не содержат в своей конструкции нейтрализаторы, системы улавливания паров бензина, датчиков кислорода (О2).
По внешнему виду конструкции двигателя можно отличить автомобиль с ДВС ЕВРО 3 от ЕВРО 2. В конструкции машины ЕВРО-3 устанавливаются два датчика кислорода в выпускную систему. В конструкции ЕВРО-2 такой датчик один. Также отличаются по наличию датчика неровной дороги и внешней форме адсорбера.
Термины по теме ЭСУД
Контроллер — основа электронной системы управления. Считывает данные с датчиков о режиме работы ДВС. Производит сложные вычисления и управляет исполнительными узлами и деталями.
ДМРВ — это датчик массового расхода воздуха, который преобразует значение воздуха, который поступил в рабочие камеры цилиндров в электрических сигнал.
Датчик скорости — занимается преобразованием значения скорости движения автомобиля в электросигнал.
Датчик кислорода — преобразует значение концентрации кислорода в отработанных газах после нейтрализатора в электрический сигнал.
Датчик кислорода управляющий — преобразует значение кислорода в отработанных газах до нейтрализатора в электрический сигнал.
Датчик неровной дороги — занимается преобразованием значения вибрации кузова в электроимпульс.
Датчик фаз — передает информацию контроллеру в момент нахождения поршня в верхней мертвой точке (ВМТ) на такте сжатия.
Датчик температуры ОЖ — преобразует температуру антифриза, тосола, воды в электрический импульс.
Датчик положения коленчатого вала двигателя — преобразует угловое положение коленвала в электрический импульс.
Датчик положения дроссельной заслонки — преобразует значение угла закрытия дроссельной заслонки в элетросигнал.
Датчик детонации — преобразует значение механических шумов в электросигнал.
Модуль зажигания — занимается накапливанием энергии для воспламенения смеси в камере сгорания цилиндров ДВС и держит высокое напряжения на электродах свечей зажигания.
Форсунка — занимается подачей топлива в определенных пропорциях.
Регулятор давления топлива (РДТ) — держит постоянное давление в подающей магистрали топлива.
Адсорбер — элемент, который улавливает пары бензина.
Модуль бензонасоса — держит избыточное давление в топливной магистрали.
Клапан продувки адсорбера — обеспечивает улавливание и продувку паров бензина.
Топливный фильтр — фильтр тонкой очистки занимается улавливанием механических примесей топлива.
Нейтрализатор — элемент системы впрыска для уменьшения токсичности. Вредные вещества нейтрализуются и превращаются в АЗОТ, ВОДУ и ДВУОКИСЬ УГЛЕРОДА.
Диагностическая лампа — относится к элементам бортовой диагностики, занимается информированием водителя о неполадках ЭСУД.
Диагностический разъем — служи для подключения оборудования диагностики авто через ноутбук, планшет или телефон.
Регулятор холостого хода — поддерживает холостой ход в оптимальном режиме, регулируя подачу воздуха в двигатель на холостом ходу.
Видео
В этом видео разбирается, что такое ЭСУД, инжектор это или нет, и т.д.
ЭБУ: принцип работы, достоинства и недостатки, причины поломок
Электронный блок управления двигателем – без этого компонента современный автомобиль попросту немыслим. Во всей системе управления силовым агрегатом ЭБУ является основным элементом.

Задача электронного блока управления двигателем
Его назначение состоит в приеме поступающей информации, которую направляют различные датчики. Эти данные обрабатываются по особому алгоритму, после чего создаются команды для составляющих исполнительного характера. Наличие в конструкции авто ЭБУ дает возможность оптимизировать главные показатели функционирования силового агрегата:
- крутящий момент;
- мощность;
- состав отработавших газов;
- расход и т.д.
А еще именно электроника осуществляет диагностику всех систем машины.
Немного истории
Появление электронного блока управления двигателем было обусловлено необходимостью подачи в цилиндры мотора топливной смеси в нужном количестве и требуемой консистенции. До создания электронного блока эти функции выполнял карбюратор, на совершенствование которого были направлены основные силы конструкторов.
Однако, появление доступных и дешевых микрочипов ознаменовало закат карбюраторной эпохи, что произошло в 70-х годах. Но первые электронные блоки были созданы итальянцами из Alfa Romeo для их модели 6C2500, что произошло в середине 50-х годов. Назывался этот блок – «Caproni-Fuscaldo».
Постепенно ЭБУ совершенствовались, «учились» охватывать показания все большего числа датчиков, управлять системой охлаждения и зажигания, становились производительнее и т. д. Современный электронный блок в состоянии создать Controller area network – единую систему управления – обмениваясь данными с другими системами авто.
Компоненты ЭБУ
Все составные части блока управлением можно поделить на 2 больших блока:
Программное обеспечение
Оно состоит из пары модулей вычислительного характера:
- контрольного – он настроен на инспектирование исходящих сигналов, а также их корректировку, если в этом есть необходимость. Причем данный модуль в состоянии даже заглушить силовой агрегат;
- функционального – в его задачи входит получение сигналов, поступающих от различных датчиков, дальнейшая их обработка, а также формирование команд для приборов исполнительного характера.
Аппаратное обеспечение
Оно состоит из массы электронных элементов – микропроцессоров и других. Установленный аналогово-цифровой преобразователь ловит аналоговые сигналы, что идут от разных датчиков, и переводит их в цифровой формат, на который и ориентирован микропроцессор. Если имеется необходимость обратного преобразования (команд, поступающих от процессора), то преобразователь переводит и их. Кроме того, на ЭБУ поступают и импульсные сигналы, которые также проходят через преобразователь для изменения их формата в цифровые.
Принцип работы электронного блока
Функционирование ЭБУ заключается в приеме информации из различных датчиков, число которых на современных моделях достигает 20-ти и более:
- данные о расходе воздуха;
- показатели с лямбда-зонда;
- информация о коленчатом вале (его положение и частота вращения детали);
- сигналы о неровности трассы и т. д.

Помимо обработки этих сигналов, ЭБУ отправляет сигналы различным устройствам:
- зажигание – это может быт как одна катушка, так и сразу несколько (зависит от типа силового агрегата). Данный узел отвечает за своевременную подачу искры со свечи в цилиндры мотора.
- световой индикатор – его назначение состоит в выдаче уведомлений о наличии ошибок, причем как в двигателе, так и непосредственно в блоке.
- форсунки – посредством них осуществляется впрыск горючего в цилиндры. При этом частота изменения количества этого горючего постоянно меняется, ведь зависит от различных условий. В данном случае на первый план выходят характеристики форсунок (реакция их управляющих компонентов на перемены команд из ЭБУ, а также скорость их функционирования).
- тестеры – оборудование диагностического назначения подключается через специальный разъем, если возникает необходимость в проверке мотора и электронного блока управления двигателем.
Плюсы и минусы электронного блока управления двигателем
Несмотря на очевидные достоинства ЭБУ, у него имеются не только сильные стороны.
Достоинства ЭБУ
- оптимизация динамических показателей;
- снижение расхода;
- простота запуска мотора – ЭБУ оперативно адаптируется в непростых условиях функционирования (прогрев мотора зимой или режим холостого хода);
- отсутствие потребности в ручной регулировке;
- повышение показателей экологической чистоты.
Недостатки ЭБУ
- дороговизна компонентов;
- невозможность ремонта – только замена;
- потребность в дорогом и сложном оборудовании для диагностики ЭБУ, а еще специально обученных техниках и электриках;
- высокие требования относительно показателей надежности в электропитании;
- необходимость в качественном горючем.
Признаки выхода из строя ЭБУ и причины его поломок
Как правило, поломка ЭБУ характеризуется наличием следующих признаков:
- блок не реагирует на сигналы с лямбда-зонда – показания датчиков температуры, а также положения дроссельной заслонки;
- отсутствуют сигналы, свидетельствующие об управлении разными компонентами исполнительного характера – клапаном холостого хода, системой зажигания, топливными форсунками, бензонасосом и т. д.
- повреждения механического характера – перегоревшие проводники или микросхемы.
Видео: Ремонт электронных блоков управления
Обычно выделяют несколько наиболее распространенных случаев, что в состоянии привести к подобной неисправности:
- попадание влаги на поверхность ЭБУ;
- замыкание проводки вследствие ее обрыва или иного фактора;
- неверная полярность во время подключения аккумулятора;
- активация стартера, когда силовая шина отключена;
- когда аккумулятор «прикуривается» от автомобиля, у которого запущен двигатель;
- если аккумуляторная клемма снимается при работающем моторе;
- в случае, когда в процессе проведения сварочных работ электрод цепляет проводку машины или ее датчики;
- ремонт либо установка сигнализации неквалифицированным электриком;
- поломки в системе зажигания (ее высоковольтной части) – это могут быть провода, катушки зажигания или распределитель.
При инспектировании необходимо сначала проверить возможности обеспечения, а только потом возможности исполнения. Причем для авто есть таблицы значимости каждого компонента. Причина такого ранжирования в том, что утрата только одной функции обеспечения, как правило, тянет за собой потерю сразу нескольких функций исполнения.
Как видно, электронный блок управления двигателем играет ключевую роль в процессе функционирования всей системы. Поэтому неисправности данного компонента должны быть устранены.
Источник Источник Источник Источник http://press.ocenin.ru/elektronnaya-arhitektura-v-avtomobil/
Источник http://autostuk.ru/esud.html
http://avtomotoprof.ru/elektronnyie-sistemyi-avtomobilya/ebu-printsip-rabotyi-dostoinstva-i-nedostatki-prichinyi-polomok/