Системы активной безопасности автомобилей
Характеристика системы безопасности автомобиля и предотвращение аварийной ситуации на дорогах. Экстренное торможение и электронная блокировка дифференциала. Принципы работы антиблокировочной системы тормозов при низких скоростях движения транспорта.
| Рубрика | Транспорт |
| Вид | реферат |
| Язык | русский |
| Дата добавления | 16.05.2016 |
| Размер файла | 50,9 K |
- посмотреть текст работы
- скачать работу можно здесь
- полная информация о работе
- весь список подобных работ

Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на Источник Источник http://www.allbest.ru/
Системы активной безопасности автомобилей
автомобиль торможение антиблокировочный транспорт
Основным предназначением систем активной безопасности автомобиля является предотвращение аварийной ситуации. При возникновении такой ситуации система самостоятельно (без участия водителя) оценивает вероятную опасность и при необходимости предотвращает ее путем активного вмешательства в процесс управления автомобилем. Применение систем активной безопасности позволяет в различных критических ситуациях сохранять контроль над автомобилем или, другими словами, сохранить курсовую устойчивость и управляемость автомобиля. Под курсовой устойчивостью понимается способность автомобиля сохранять движение по заданной траектории, противодействуя силам, вызывающим занос и опрокидывание. Управляемость заключается в способности автомобиля двигаться в заданном водителем направлении. Наиболее известными и востребованными системами активной безопасности являются:
антиблокировочная система тормозов;
система курсовой устойчивости;
система распределения тормозных усилий;
система экстренного торможения;
система обнаружения пешеходов;
электронная блокировка дифференциала.
Перечисленные системы активной безопасности конструктивно связаны и тесно взаимодействуют с тормозной системой автомобиля и значительно повышают ее эффективность. Ряд систем может управлять величиной крутящего момента через систему управления двигателем. Имеются также вспомогательные системы активной безопасности (ассистенты), предназначенные для помощи водителю в трудных с точки зрения вождения ситуациях. Помимо своевременного предупреждения водителя о возможной опасности, системы осуществляют и активное вмешательство в управление автомобилем, используя при этом тормозную систему и рулевое управление. Большое количество таких систем появилось и появляется в связи со стремительным развитием электронных систем управления (появлением новых видов входных устройств, повышением производительности электронных блоков управления). К вспомогательным системам активной безопасности относятся:
система кругового обзора;
система аварийного рулевого управления;
система помощи движению по полосе;
система помощи при перестроении;
система ночного видения;
система распознавания дорожных знаков
система контроля усталости водителя
система помощи при спуске;
система помощи при подъеме.
Промежуточное положение между активными и пассивными системами безопасности занимают превентивные системы безопасности.
Рассмотрим работу и устройство некоторых из систем.
1. Антиблокировочная система тормозов
При экстренном торможении автомобиля возможна блокировка одного или нескольких колес. В этом случае весь запас по сцеплению колеса с дорогой используется в продольном направлении. Заблокированное колесо перестает воспринимать боковые силы, удерживающие автомобиль на заданной траектории, и скользит по дорожному покрытию. Автомобиль теряет управляемость, и малейшее боковое усилие приводит его к заносу. Антиблокировочная система тормозов (АБС, ABS, Antilock Brake System) предназначена предотвратить блокировку колес при торможении и сохранить управляемость автомобиля.
Антиблокировочная система повышает эффективность торможения, уменьшает длину тормозного пути на сухом и мокром покрытии, обеспечивает лучшую маневренность на скользкой дороге, управляемость при экстренном торможении. В актив системы можно записать меньший и равномерный износ шин. Вместе с тем, система АБС не лишена недостатка. На рыхлой поверхности (песок, гравий, снег) применение антиблокировочной системы увеличивает тормозной путь. На таком покрытии наименьший тормозной путь обеспечивается как раз при заблокированных колесах. При этом перед каждым колесом формируется клин из грунта, который и приводит к сокращению тормозного пути. В современных конструкциях ABS этот недостаток почти устранен — система автоматически определяет характер поверхности и для каждой реализует свой алгоритм торможения.
Антиблокировочная система тормозов выпускается с 1978 года. За прошедший период система претерпела значительные изменения. На основе системы АБС построена система распределения тормозных усилий. С 1985 года система интегрирована сантипробуксовочной системой. С 2004 года все автомобили, выпускающиеся в Европе, оснащаются антиблокировочной системой тормозов. Ведущим производителем антиблокировочной системы является фирма Bosch. С 2010 года компания производит систему ABS 9 поколения, которую отличает наименьший вес и габаритные размеры. Так, гидравлический блок системы весит всего 1,1 кг. Система АБС устанавливается в штатную тормозную систему автомобиля без изменения ее конструкции. Наиболее эффективной является антиблокировочная система тормозов с индивидуальным регулированием скольжения колеса, т.н. четырехканальная система. Индивидуальное регулирование позволяет получить оптимальный тормозной момент на каждом колесе в соответствии с дорожными условиями и, как следствие, минимальный тормозной путь.
Конструкция антиблокировочной системы включает датчики частоты вращения колес, датчик давления в тормозной системе, блок управления и гидравлический блок в качестве исполнительного устройства. Датчик скорости устанавливается на каждое колесо. Он фиксирует текущее значение частоты вращения колеса и преобразует его в электрический сигнал. На основании сигналов датчиков блок управления выявляет ситуацию блокирования колеса. В соответствии с установленным программным обеспечением блок формирует управляющие воздействия на исполнительные устройства — электромагнитные клапаны и электродвигатель насоса обратной подачи гидравлического блока системы. Гидравлический блок объединяет впускные и выпускные электромагнитные клапаны, аккумуляторы давления, насос обратной подачи с электродвигателем, демпфирующие камеры.
В гидравлическом блоке каждому тормозному цилиндру колеса соответствует один впускной и один выпускной клапаны, которые управляют торможением в пределах своего контура. Аккумулятор давления предназначен для приема тормозной жидкости при сбросе давления в тормозном контуре. Насос обратной подачи подключается, когда емкости аккумуляторов давления недостаточно. Он увеличивает скорость сброса давления. Демпфирующие камеры принимают тормозную жидкость от насоса обратной подачи и гасят ее колебания. В гидравлическом блоке устанавливается два аккумулятора давления и две демпфирующие камеры по числу контуров гидропривода тормозов. Контрольная лампа на панели приборов сигнализирует о неисправности системы.
Принцип работы антиблокировочной системы тормозов. Работа антиблокировочной системы тормозов носит цикличный характер. Цикл работы системы включает три фазы:
На основании электрических сигналов, поступающих от датчиков угловой скорости, блок управления ABS сравнивает угловые скорости колес. При возникновении опасности блокирования одного из колес, блок управления закрывает соответствующий впускной клапан.
Выпускной клапан при этом также закрыт. Происходит удержание давления в контуре тормозного цилиндра колеса. При дальнейшем нажатии на педаль тормоза давление в тормозном цилиндре колеса не увеличивается.
При продолжающейся блокировке колеса, блок управления открывает соответствующий выпускной клапан.
Впускной клапан при этом остается закрытым. Тормозная жидкость перепускается в аккумулятор давления. Происходит сброс давления в контуре, при этом скорость вращения колеса увеличивается.
При недостаточной емкости аккумулятора давления, блок управления ABS подключает к работе насос обратной подачи.
Насос обратной подачи перекачивает тормозную жидкость в демпфирующую камеру, уменьшая давление в контуре. Водитель при этом ощущает пульсацию педали тормоза.
Как только угловая скорость колеса превысит определенное значение, блок управления закрывает выпускной клапан и открывает впускной. Происходит увеличение давления в контуре тормозного цилиндра колеса. Цикл работы антиблокировочной системы тормозов повторяется до завершения торможения или прекращения блокирования. Система ABS не отключается.
2. Антипробуксовочная система
Антипробуксовочная система (другое наименование — противобуксовочная система) предназначена для предотвращения пробуксовки ведущих колес. В зависимости от производителя антипробуксовочная система имеет следующие торговые названия:
ASR (Automatic Slip Regulation, Acceleration Slip Regulation) на автомобилях Mercedes, Volkswagen, Audi и др.;
ASC (Anti-Slip Control) на автомобилях BMW;
A-TRAC (Active Traction Control) на автомобилях Toyota;
DSA (Dynamic Safety) на автомобилях Opel;
DTC (Dynamic Traction Control) на автомобилях BMW;
ETC (Electronic Traction Control) на автомобилях Range Rover;
ETS ( Electronic Traction System) на автомобилях Mercedes;
STC (System Traction Control) на автомобилях Volvo;
TCS (Traction Control System) на автомобилях Honda;
TRC (Traking Control) на автомобилях Toyota.
Несмотря на многообразие названий, конструкция и принцип работы данных противобуксовочных систем во многом похожи, поэтому рассмотрены на примере одной из самых распространенных систем — системы ASR. Антипробуксовочная система построена на конструктивной основе антиблокировочной системы тормозов. В системе ASR реализованы две функции: электронная блокировка дифференциала и управление крутящим моментом двигателя. Для реализации противобуксовочных функций в системе используется насос обратной подачи и дополнительные электромагнитные клапаны (переключающий и клапан высокого давления) на каждое из ведущих колес в гидравлическом блоке ABS. Управление системой ASR осуществляется за счет соответствующего программного обеспечения, включенного в блок управления ABS. В своей работе блок управления ABS/ASR взаимодействует с блоком управления системы управления двигателем.
Принцип работы антипробуксовочной системы. Система ASR предупреждает пробуксовку колес во всем диапазоне скоростей автомобиля:
при низких скоростях движения (от 0 до 80 км/ч) система обеспечивает передачу крутящего момента за счет подтормаживания ведущих колес;
при скорости выше 80 км/ч усилия регулируются за счет уменьшения передаваемого от двигателя крутящего момента.
На основании сигналов датчиков частоты вращения колес блок управления ABS/ASR определяет следующие характеристики:
угловое ускорение ведущих колес;
скорость движения автомобиля (на основании угловой скорости неведущих колес);
характер движения автомобиля — прямолинейное или криволинейное (на основании сравнения угловых скоростей неведущих колес);
величину проскальзывания ведущих колес (на основании разницы угловых скоростей ведущих и неведущих колес).
В зависимости от текущего значения эксплуатационных характеристик производится управление тормозным давлением или управление крутящим моментом двигателя. Управление тормозным давлением осуществляется циклически. Рабочий цикл имеет три фазы — увеличение давления, удержание давления и сброс давления. Увеличение давления тормозной жидкости в контуре обеспечивает торможение ведущего колеса. Оно производится за счет включения насоса обратной подачи, закрытия переключающего клапана и открытия клапана высокого давления. Удержание давления достигается за счет отключения насоса обратной подачи. Сброс давления производится по окончании пробуксовки при открытых впускном и переключающем клапанах. При необходимости цикл работы повторяется. Управление крутящим моментом двигателя осуществляется во взаимодействии с системой управления двигателем. На основании информации о проскальзовании ведущих колес, получаемой от датчиков угловой скорости колес, и фактической величине крутящего момента, получаемой от блока управления двигателем, блок управления противобуксовочной системы вычисляет величину необходимого крутящего момента. Данная информация передается в блок управления системы управления двигателем и реализуется с помощью различных действий:
изменения положения дроссельной заслонки;
пропуска впрыскиваний топлива в системе впрыска;
пропуска импульсов зажигания или изменения угла опережения зажигания в системе зажигания;
отмены переключения передачи в автомобилях с автоматической коробкой передач.
При срабатывании противобуксовочной системы загорается контрольная лампа на панели приборов. Система имеет возможность отключения.
3. Система курсовой устойчивости
Система курсовой устойчивости (другое наименование — система динамической стабилизации) предназначена для сохранения устойчивости и управляемости автомобиля за счет заблаговременного определения и устранения критической ситуации. С 2011 года оснащение системой курсовой устойчивости новых легковых автомобилей является обязательным в США, Канаде, странах Евросоюза.
Система позволяет удерживать автомобиль в пределах заданной водителем траектории при различных режимах движения (разгоне, торможении, движения по прямой, в поворотах и при свободном качении). В зависимости от производителя различают следующие названия системы курсовой устойчивости:
ESP (Electronic Stability Programme) на большинстве автомобилей в Европе и Америке;
ESC (Electronic Stability Control) на автомобилях Honda, Kia, Hyundai;
DSC (Dynamic Stability Control) на автомобилях BMW, Jaguar, Rover;
DTSC (Dynamic Stability Traction Control) на автомобилях Volvo;
VSA (Vehicle Stability Assist) на автомобилях Honda, Acura;
VSC (Vehicle Stability Control) на автомобилях Toyota;
VDC (Vehicle Dynamic Control) на автомобилях Infiniti, Nissan, Subaru.
Устройство и принцип действия системы курсовой устойчивости рассмотрены на примере самой распространенной системы ESP, которая выпускается с 1995 года.
Устройство системы курсовой устойчивости.
Система курсовой устойчивости является системой активной безопасности более высокого уровня и включает антиблокировочную систему тормозов (ABS), систему распределения тормозных усилий (EBD), электронную блокировку дифференциала (EDS), антипробуксовочную систему (ASR). Система курсовой устойчивости объединяет входные датчики, блок управления и гидравлический блок в качестве исполнительного устройства. Входные датчики фиксируют конкретные параметры автомобиля и преобразуют их в электрические сигналы. С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля.
Используются в оценке действий водителя датчики угла поворота рулевого колеса, давления в тормозной системе, выключатель стоп-сигнала. Оценивают фактические параметры движения датчики частоты вращения колес, продольного и поперечного ускорения, угловой скорости автомобиля, давления в тормозной системе. Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности:
впускные и выпускные клапаны системы ABS;
переключающие и клапаны высокого давления системы ASR;
контрольные лампы системы ESP, системы ABS, тормозной системы.
В своей работе блок управления ESP взаимодействует с системой управления двигателем и автоматической коробки передач (через соответствующие блоки). Помимо приема сигналов от этих систем блок управления формирует управляющие воздействия на элементы системы управления двигателем и АКПП. Для работы системы динамической стабилизации используется гидравлический блок системы ABS/ASR со всеми компонентами.
Принцип работы системы курсовой устойчивости.
Определение наступления аварийной ситуации осуществляется путем сравнения действий водителя и параметров движения автомобиля. В случае, когда действия водителя (желаемые параметры движения) отличаются от фактических параметров движения автомобиля, система ESP распознает ситуацию как неконтролируемую и включается в работу. Стабилизация движения автомобиля с помощью системы курсовой устойчивости может достигаться несколькими способами:
подтормаживанием определенных колес;
изменением крутящего момента двигателя;
изменением угла поворота передних колес (при наличии системы активного рулевого управления);
изменением степени демпфирования амортизаторов (при наличии адаптивной подвески).
При недостаточной поворачиваемости система ESP предотвращает увод автомобиля наружу за пределы траектории поворота, подтормаживая заднее внутреннее колесо и изменяя крутящий момент двигателя. При избыточной поворачиваемости занос автомобиля в повороте предотвращается подтормаживанием переднего наружного колеса и изменением крутящего момента двигателя. Подтормаживание колес производится путем включения в работу соответствующих систем активной безопасности. Работа при этом носит циклический характер: увеличение давления, удержание давления и сброс давления в тормозной системе. Изменение крутящего момента двигателя в системе ESP может осуществляться несколькими путями:
изменением положения дроссельной заслонки;
пропуском впрыска топлива;
пропуском импульсов зажигания;
изменением угла опережения зажигания;
отменой переключения передачи в АКПП;
перераспределением крутящего момента между осями (при наличии полного привода).
Система, объединяющая систему курсовой устойчивости, рулевое управление и подвеску носит название интегрированной системы управления динамикой автомобиля.
Дополнительные функции системы курсовой устойчивости.
В конструкции системы курсовой устойчивости могут быть реализованы следующие дополнительные функции (подсистемы): гидравлический усилитель тормозов, предотвращения опрокидывания, предотвращения столкновения, стабилизации автопоезда, повышения эффективности тормозов при нагреве, удаления влаги с тормозных дисков и др. Все перечисленные системы, в основном, не имеют своих конструктивных элементов, а являются программным расширением системы ESP. Система предотвращения опрокидывания ROP (Roll Over Prevention) стабилизирует движение автомобиля при угрозе опрокидывания.
Предотвращение опрокидывания достигается за счет уменьшения поперечного ускорения путем подтормаживания передних колес и снижения крутящего момента двигателя. Дополнительное давление в тормозной системе создается с помощью активного усилителя тормозов. Система предотвращения столкновения (Braking Guard) может быть реализована в автомобиле, оснащенном адаптивным круиз-контролем. Система предотвращает опасность столкновения с помощью визуальных и звуковых сигналов, а в критической ситуации — путем нагнетания давления в тормозной системе (автоматического включения насоса обратной подачи). Система стабилизации автопоезда может быть реализована в автомобиле, оборудованным тягово-сцепным устройством. Система предотвращает рыскание прицепа при движении автомобиля, которое достигается за счет торможения колес или снижения крутящего момента.
Система повышения эффективности тормозов при нагреве FBS (Fading Brake Support, другое наименование — Over Boost) предотвращает недостаточное сцепление тормозных колодок с тормозными дисками, возникающее при нагреве, путем дополнительного увеличения давления в тормозном приводе. Система удаления влаги с тормозных дисков активируется на скорости свыше 50км/ч и включенных стеклоочистителях. Принцип работы системы заключается в кратковременном повышении давления в контуре передних колес, за счет чего тормозные колодки прижимаются к дискам, и происходит испарение влаги.
4. Система распределения тормозных усилий
Система распределения тормозных усилий предназначена для предотвращения блокировки задних колес за счет управления тормозным усилием задней оси. Современный автомобиль устроен так, что на заднюю ось приходится меньшая нагрузка, чем на переднюю. Поэтому для сохранения курсовой устойчивости автомобиля блокировка передних колес должна наступать раньше задних колес. При резком торможении автомобиля происходит дополнительное уменьшение нагрузки на заднюю ось, так как центр тяжести смещается вперед. А задние колеса, при этом, могут оказаться заблокированными. Система распределения тормозных усилий представляет собой программное расширение антиблокировочной системы тормозов. Другими словами, система использует конструктивные элементы системы ABS в новом качестве. Общепринятыми торговыми названиями системы являются:
EBD, Electronic Brake Force Distribution;
EBV, Elektronishe Bremskraftverteilung.
Принцип работы системы распределения тормозных усилий. Работа системы EBD, также как и система ABS, носит цикличный характер. Цикл работы включает три фазы:
По данным датчиков частоты вращения колес блок управления ABS сравнивает тормозные усилия передних и задних колес. Когда разница между ними превышает заданную величину, включается алгоритм системы распределения тормозных усилий. На основании разности сигналов датчиков блок управления определяет начало блокирования задних колес. Он закрывает впускные клапаны в контурах тормозных цилиндров задних колес. Давление в контуре задних колес удерживается на текущем уровне. Впускные клапаны передних колес остаются открытыми. Давление в контурах тормозных цилиндров передних колес продолжает увеличиваться до начала блокирования передних колес.
Если колеса задней оси продолжают блокироваться, открываются соответствующие выпускные клапаны и давление в контурах тормозных цилиндров задних колес уменьшается.
При превышении угловой скорости задних колес заданного значения, давление в контурах увеличивается. Происходит торможение задних колес. Работа системы распределения тормозных усилий заканчивается с началом блокирования передних (ведущих) колес. При этом в работу включается система ABS.
5. Система экстренного торможения
Система экстренного торможения предназначена для эффективного использования тормозов в экстренной ситуации. Как показывает практика, применение системы экстренного торможения на автомобиле позволяет сократить тормозной путь в среднем на 15-20%. Это, порой, является решающим фактором предотвращения аварии или уменьшения ее последствий. Различают два вида систем экстренного торможения — помощи при экстренном торможении и автоматического экстренного торможения. Система помощи при экстренном торможении позволяет реализовать максимальное тормозное давление при нажатии водителем на педаль тормоза, т.е. система дотормаживает за него. Система автоматического экстренного торможения создает частичное или максимальное тормозное давление без участия водителя, т.е. автоматически.
Система помощи при экстренном торможении.
Конструкции систем помощи при экстренном торможении можно разделить на два типа по принципу создания максимального тормозного давления: пневматические и гидравлические. Системы помощи при экстренном торможении пневматического типа обеспечивают эффективную работу вакуумного усилителя тормозов. К ним относятся системы:
BA (Brake Assist), BAS (Brake Assist System), EBA (Emergency Brake Assist) на автомобилях Mercedes-Benz, BMW, Toyota, Volvo и др.;
AFU на автомобилях Renault, Peugeot, Citroen.
Конструктивно данные системы объединяют датчик скорости перемещения штока вакуумного усилителя, электронный блок управления и электромагнитный привод штока. Система помощи при экстренном торможении пневматического типа устанавливается, как правило, на автомобили, оборудованные системой ABS. Принцип работы данной системы основан на распознавании ситуации экстренного торможения по скорости нажатия педали тормоза. Скорость нажатия на педаль тормоза фиксирует датчик скорости перемещения штока вакуумного усилителя и передает сигнал в электронный блок управления. Если величина сигнала превышает установленное значение, электронный блок управления активирует электромагнит привода штока. Вакуумный усилитель тормозов дожимает педаль тормоза. Экстренное торможение происходит до срабатывания системы ABS. Системы помощи при экстренном торможении гидравлического типа обеспечивают максимальное давление жидкости в тормозной системе за счет использования элементов системы курсовой устойчивости. К таким системам относятся:
HBA (Hydraulic Braking Assistance) на автомобилях Volkswagen, Audi;
HBB (Hydraulic Brake Booster) на автомобилях Volkswagen, Audi;
SBC (Sensotronic Brake Control) на автомобилях Mercedes-Benz;
DBC (Dynamic Brake Control) на автомобилях BMW;
BA Plus (Brake Assist Plus) на автомобилях Mercedes-Benz.
Система HBA распознает экстренную ситуацию по скорости и силе нажатия педали тормоза. В работе системы используется датчик давления в тормозной системе, датчики частоты вращения колес, выключатель стоп-сигнала. На основании поступающих сигналов электронный блок управления при необходимости включает насос обратной подачи, который доводит давление в тормозной системе до максимального. Действие программы происходит до срабатывания системы ABS.
Система HBB в определенных режимах эксплуатации автомобиля (прогрев двигателя и др.) дублирует вакуумный усилитель тормозов. В работе системы используются датчик давления в тормозной системе, датчик разряжения в вакуумном усилителе, выключатель стоп-сигнала. При недостаточном разряжении в камерах вакуумного усилителя система HBB включает насос обратной подачи и повышает давление в тормозной системе до необходимой величины. Система SBC в своей работе учитывает множество факторов, в том числе: скорость переноса ноги с педали газа на педаль тормоза, силу нажатия на педаль тормоза, качество дорожного покрытия, направление движения, другие параметры. В соответствии с конкретными условиями движения электронный блок управления формирует оптимальное тормозное усилие на каждое колесо. Система BA Plus контролирует расстояние до впереди идущего автомобиля с помощью радаров системы Distronic. Если расстояние мало и существует опасность столкновения производится визуальное и звуковое предупреждение водителя. Если водитель тормозит недостаточно эффективно система дотормаживает за него.
Система автоматического экстренного торможения.
Система автоматического экстренного торможения с помощью радара (лидара) и видеокамеры обнаруживает впереди идущий автомобиль. В случае вероятной аварии (интенсивного сокращения расстояния между автомобилями) система реализует частичное или максимальное тормозное усилие, замедляет или останавливает автомобиль. Даже если столкновение произошло, последствия его для обоих автомобилей будут значительно меньше. Конструктивно система автоматического экстренного торможения построена на других системах активной безопасности — системе адаптивного круиз-контроля (контроль расстояния) и системе курсовой устойчивости (автоматическое торможение). Известными системами автоматического экстренного торможения являются:
Pre-Safe Brake на автомобилях Mercedes-Benz;
Collision Mitigation Braking System, CMBS на автомобилях Honda;
City Brake Control на автомобилях Fiat;
Active City Stop и Forward Alert на автомобилях Ford;
Forward Collision Mitigation, FCM на автомобилях Mitsubishi;
City Emergency Brake на автомобилях Volkswagen;
Collision Warning with Auto Brake и City Safety на автомобилях Volvo;
Predictive Emergency Braking System, PEBS от Bosch;
Automatic Emergency Braking, AEB от TRW.
Необходимо отметить, что в перечисленных системах помимо автоматического экстренного торможения реализованы другие функции, среди которых предупреждение водителя об опасности столкновения, активация некоторых устройств пассивной безопасности. Поэтому данные системы еще называют превентивными системами безопасности
6. Система обнаружения пешеходов
Система обнаружения пешеходов предназначена для предотвращения столкновения с пешеходами. Система распознает людей возле автомобиля, автоматически замедляет автомобиль, снижает силу удара и даже избегает столкновения. Применение системы позволяет на 20% сократить смертность пешеходов при дорожно-транспортном происшествии и на 30% снизить риск тяжелых травм. Впервые система обнаружения пешеходов была использована на автомобилях Volvo в 2010 году. В настоящее время система имеет ряд модификаций:
Pedestrian Detection System от Volvo;
Advanced Pedestrian Detection System от TRW;
EyeSight от Subaru.
В системе обнаружения пешеходов реализованы следующие взаимосвязанные функции:
предупреждение об опасности столкновения;
Для обнаружения пешеходов используется видеокамера и радар(две видеокамеры у Subaru), которые эффективно работают на расстоянии до 40 м. Если пешеход обнаружен видеокамерой и результат подтвержден радаром, система отслеживает движение пешехода, прогнозирует его дальнейшее перемещение и оценивает вероятность столкновения с автомобилем. Результаты обнаружения выводятся на экран мультимедийной системы. Система также реагирует на транспортные средства, которые стоят на месте или движутся в попутном направлении. Если системы установила, что при текущем характере движения автомобиля столкновение с пешеходом неизбежно, посылается звуковое предупреждение водителю. Далее система оценивает реакцию водителя на предупреждение — изменение характера движения автомобиля (торможение, изменение направления движения). Если реакция отсутствует, система обнаружения пешеходов автоматически доводит автомобиль до остановки. В этом качестве система обнаружения пешеходов является производной системы автоматического экстренного торможения.
Система обнаружения пешеходов позволяет полностью избежать столкновения на скорости до 35 км/ч. При большей скорости система не может полностью предотвратить дорожно-транспортное происшествие, но тяжесть последствий для пешехода может быть уменьшена за счет замедления автомобиля перед столкновением. Статистические данные свидетельствуют, что вероятность смертельного исхода от столкновения пешехода с автомобилем на скорости 65 км/ч составляет 85%, 50 км/ч — 45%, 30 км/ч — 5%.Риск травмирования пешеходов значительно снижается, если система обнаружения пешеходов используется совместно ссистемой защиты пешеходов или подушкой безопасности для пешеходов. Обнаружение пешеходов с помощью инфракрасных камер реализовано в системе ночного видения, но активное предупреждение столкновения в ней не предусмотрено.
Система обнаружения пешеходов показала свою эффективность в сложных условиях городского движения. Она позволяет одновременно отслеживать несколько пешеходов, движущихся различными курсами, различает движение пешеходов с зонтами во время дождя и др. Система неработоспособна ночью и в плохую погоду.
7. Электронная блокировка дифференциала
Электронная блокировка дифференциала (EDS, Elektronische Differenzialsperre) предназначена для предотвращения пробуксовки ведущих колес при трогании автомобиля с места, разгоне на скользкой дороге, движении по прямой и в поворотах за счет подтормаживания ведущих колес. Система получила свое название по аналогии с соответствующей функцией дифференциала. Система EDS срабатывает при проскальзывании одного из ведущих колес. Она подтормаживает скользящее колесо, за счет чего на нем увеличивается крутящий момент. Так как ведущие колеса соединены симметричным дифференциалом, на другом колесе (с лучшим сцеплением) крутящий момент также увеличивается. Система работает в диапазоне скоростей от 0 до 80 км/ч.
Система EDS построена на основе антиблокировочной системы тормозов. В отличие от системы ABS в конструкции электронной блокировки дифференциала предусмотрена возможность самостоятельного создания давления в тормозной системе. Для реализации данной функции используется насос обратной подачи и два электромагнитных клапана (на каждое из ведущих колес), включенные в гидравлический блок ABS. Это переключающий клапан и клапан высокого давления. Управление системой осуществляется с помощью соответствующего программного обеспечения в блоке управления ABS. Электронная блокировка дифференциала, как правило, является составной частью антипробуксовочной системы.
Принцип работы электронной блокировки дифференциала.
Работа электронной блокировки дифференциала носит цикличный характер. Цикл работы системы включает три фазы:
Пробуксовка ведущего колеса определяется на основании сравнения сигналов, поступающих от датчиков частоты вращения колес. При этом блок управления закрывает переключающий клапан и открывает клапан высокого давления. Для создания давления, в контуре тормозного цилиндра ведущего колеса включается насос обратной подачи. Происходит увеличение давления тормозной жидкости в контуре и торможение ведущего колеса. При достижении тормозного усилия необходимой для предотвращения пробуксовки величины производится удержание давления. Это достигается отключением насоса обратной подачи. По окончании пробуксовки производится сброс давления. При этом впускной и переключающий клапаны в контуре тормозного цилиндра ведущего колеса открыты. При необходимости цикл работы системы EDS повторяется. Аналогичный принцип действия имеет система ETS (Electronic Traction System) от Mercedes.
Размещено на Allbest.ru
Подобные документы
Расчет и проектирование оборудования с гидравлическим приводом тормозной системы автомобилей ВАЗ. Анализ причин нарушения в работе тормозной системы автомобилей. Анализ патентных источников. Техника безопасности при эксплуатации гидропривода тормозов.
курсовая работа [432,7 K], добавлен 19.03.2013
Характеристика антиблокировочной системы, предназначенной для сохранения устойчивости автомобиля при торможении. Работа блока управления, модулятора, датчиков скорости вращения колес. Анализ системы стабилизации траектории Electronic Stability Program.
контрольная работа [27,5 K], добавлен 11.06.2012
Характеристика предназначения и принципа действия антиблокировочной тормозной системы. Изучение структуры датчика, системы регуляции давления тормозной жидкости. Обработка сигналов датчика. Моделирование антиблокировочной системы автомобиля в Vissim.
контрольная работа [647,7 K], добавлен 04.06.2014
Определение траектории движения автомобиля. Занос автомобиля в результате заблокирования колес. Электронные системы тормозов. Система динамического контроля за торможением. Система электронного распределение тормозных сил. Системы безопасности движения.
реферат [507,9 K], добавлен 19.05.2012
Исследование назначения, устройства и принципа действия тормозной системы. Анализ основных особенностей электронной антиблокировочной системы автомобиля. Характеристика техники безопасности, технического обслуживания и видов ремонтных работ Honda Accord.
курсовая работа [2,8 M], добавлен 30.04.2012
Привет студент
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ОРЛОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КУРСОВОЙ ПРОЕКТ
по дисциплине «Безопасность транспортных средств»
Содержание
1. Расчет основных показателей безопасности автотранспортного средства.
1.1. Активная безопасность.
1.1.1. Габаритные и весовые параметры автомобиля.
1.1.2. Тяговая динамичность.
1.1.3. Тормозная динамичность.
1.1.7. Оборудование рабочего места водителя.
1.2. Пассивная безопасность.
1.3. Послеаварийная безопасность.
1.4. Экологическая безопасность.
2. Подушка безопасности автомобиля ВАЗ.
2.1. Предлагаемые мероприятия по созданию автомобиля оборудованными
Список использованных источников.
Введение
Возрастание интенсивности автомобильного движения в условиях сложившейся в нашей стране дорожной сети выдвигает ряд проблем, связанных с разработкой мероприятий по обеспечению максимальной производительности и безопасности автомобильного транспорта. Как показывают результаты исследований, проведенных у нас и за рубежом, в основу решения данных проблем должно быть положено обеспечение нормальных условий для функционирования системы водитель- автомобиль-дорога-среда, т. е. обеспечение надежной связи водителя с управляемым автомобилем, с дорогой, на которой осуществляется движение и внешней средой исследующая надежность автомобиля и его работу в различных климатических условий. Работы по повышению безопасности движения в настоящее время ведутся в двух направлениях: во-первых, определяются условия, при которых не возможно возникновение дорожно-транспортного происшествия (ДТП), и разрабатывается комплекс требований, при соблюдении которых создаются эти условия; во-вторых, изыскиваются возможности, позволяющие максимально снизить тяжесть последствий ДТП, сохранить жизнь водителю и пассажирам. Первое направление получило название работы по активной безопасности, второе — работы по пассивной безопасности автомобильного транспорта.
Во всех странах мира с высоким уровнем автомобилизации ведутся интенсивные научно-исследовательские и опытно-конструкторские работы в области создания безопасного автомобиля.
Число жертв на автомобильных дорогах с каждым годом увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
В настоящее время в результате научных исследований выбраны основные положения, принципы и рекомендации по безопасности движения. Эффективность многих рекомендаций проверена на практике. Однако подавляющее их большинство относится лишь к первому звену системы автомобиль — человек — дорога — среда (А-Ч-Д-С) — к автомобилю. Но вопросы безопасности автомобильного движения нельзя решать, ограничиваясь только улучшением конструкции автомобиля, без учета взаимодействия всех компонентов системы А-Ч-Д-С. Кроме того, все мероприятия по безопасности движения необходимо рассматривать в двух аспектах: с точки зрения активной и пассивной безопасности.
1. Расчет показателей безопасности автотранспортного средства
1.1. Активная безопасность
Для количественной характеристики активной безопасности применяют как широко распространенные показатели: минимальный тормозной путь, максимальное замедление, критические скорости по условиям заноса и опрокидывания и т.п.; так и новые показатели, специфические только для данного аспекта безопасности.
На активную безопасность автомобиля влияют следующие факторы:
— компоновочные параметры автомобиля (габаритные и весовые);
— оборудование рабочего места водителя, его соответствие требованиям эргономики.
1.1.1. Габаритные и весовые параметры автомобиля
К габаритным параметрам автомобиля относятся длина La, ширина Ba, высота Ha и база L, т. е. расстояние между передней и задней осями, к весовым
— полный вес автомобиля Ga, вес, приходящийся соответственно на передний G1 и задний G2 мосты.
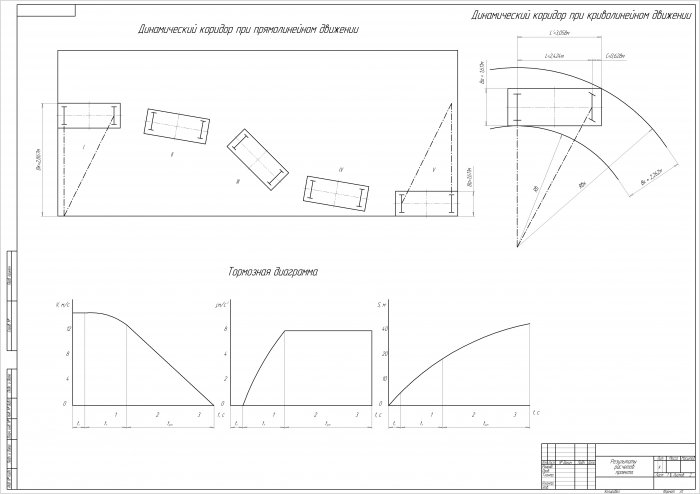
При движении автомобиль подвергается воздействию различных случайных возмущений, стремящихся изменить характер движения. Вследствие этого даже на строго прямолинейных участках дороги автомобиль движется не прямолинейно, а по кривым больших радиусов. При этом значительную часть времени он находится под углом к оси дороги, и размер полосы, потребной для его движения, — динамический коридор, превышает его габаритную ширину. Ширина динамического коридора зависит от размеров автомобиля и его скорости (рисунок 1).
Рисунок 1- Динамический коридор на прямолинейном участке дороги.
Эмпирическая зависимость между габаритной шириной автомобиля Ва,
скоростью его движения v и шириной динамического коридора Вк имеет следующий вид:
где v — в м/с, а Ва — в м.
В = 0,054 *17,721 +1,65 + 0,3 = 1,95 м
Ширина динамического коридора, необходимая для безопасного движения автомобилей с высокими скоростями, иногда значительно превышает ширину полосы движения, установленную Строительными нормами и правилами (СНиП). СНиП предусматривают для дорог с интенсивностью движения свыше 3000 автомобилей в сутки ширину полосы движения 3,75 м а для дорог с меньшей интенсивностью 3,0—3,5 м. Эти размеры не всегда обеспечивают безопасный разъезд автомобилей, поэтому водитель, чтобы избежать столкновения, вынужден снижать скорость.
![]()
Рисунок 2 — Динамический коридор на криволинейном участке дороги.
Более заметно влияние геометрических параметров автомобиля на безопасность при криволинейном движении. Хотя при крутых поворотах скорости автомобиля обычно невелики и случайные возмущения незначительны, ширина динамического коридора может быть достаточно большой. Ее можно определить по формуле (рисунок 2):
В = R — R = R — л/- (П 2 + в) ,
где RH и Re — соответственно наружный и внутренний габаритные радиусы поворота автомобиля; L’ = L + С — расстояние от заднего моста до передней части автомобиля (L — база автомобиля; С — передний свес).
L = 2,46 + 0,761 = 3,221м,
В = 4,95 -^4,95 2 — (3,221) 2 +1,65 = 2,84 м
Согласно выражению (2) при L’ &RH величина Вк может значительно
превышать Ва, что вынуждает строителей расширять полосы движения на криволинейных участках дорог. В таблице 1 приведены геометрические и весовые параметры некоторых отечественных автомобилей.
Таблица 1 — Параметры автомобиля
Геометрические параметры, м
Весовые параметры, кН
Габаритная высота На имеет значение при проезде автомобилей под путепроводами и проводами контактной сети. Чрезмерно высокие транспортные средства (например, двухэтажные троллейбусы или автобусы, полуприцепы-панелевозы или автомобили-фургоны) с высоко расположенным центром тяжести испытывают значительные угловые колебания в поперечной плоскости. При движении по неровной дороге они могут верхним углом задеть за столб или мачту.
Масса транспортного средства для безопасности движения имеет, в основном, косвенное значение. Чем больше масса автомобиля, тем труднее им управлять. Тяжелый автомобиль медленно разгоняется и останавливается. На нем трудно выполнить сложный маневр. Чем больше масса транспортного средства, тем больше динамические нагрузки на дорогу, тем меньше срок службы покрытия. Поэтому, несмотря на очевидные преимущества применения подвижного состава большой массы, во всех странах строго соблюдают ограничение осевых нагрузок и полных масс транспортных средств. В РФ все автомобили разделены на три группы:
группа А — автомобили и автопоезда дорожного типа для дорог с усовершенствованным капитальным покрытием, имеющие осевые нагрузки до 10 тонн от одиночной оси и полную массу автомобиля до 30 тонн, автопоезда до 38 тонн (т.е. могут эксплуатироваться по дорогам общего пользования 1, 2, 3 категорий, а при специальном усилении дорожной одежды по дорогам 4 категории);
группа В — автомобили и автопоезда дорожного типа, для всей сети дорог общего пользования и имеющие осевые нагрузки до 6 тонн от одиночной оси и полную массу одиночного автомобиля до 22 тонн, автопоезда до 34 тонн (могут эксплуатироваться по всем дорогам общего пользования);
внедорожные — это автомобили, не допускаемые к эксплуатации по дорогам общего пользования и имеющие нагрузку от одиночной оси >10 тонн.
1.1.2. Тяговая динамичность
Определение мощности двигателя
Требуемая эффективная мощность определяется:
10000 10000 v — скорость движения автомобиля Ga — вес автомобиля
Ga = 1340 • 9,81 = 13145,4 Н F — площадь лобового сопротивления автомобиля
F = В • H = 1,402 • 1,4 = 1,9628 м 2 B — колея подвижного состава Н — наибольшая высота подвижного состава
vmax — максимальная скорость подвижного состава равная 25 м/с кв — коэффициент сопротивления воздуха т]тр — КПД трансмиссии
Расчет и построение внешней скоростной характеристики двигателя Наиболее полно возможности двигателя отражает внешняя скоростная характеристика двигателя, которая представляет собой зависимость мощности, крутящего момента и удельного расхода топлива от угловой скорости вращения коленчатого вала.
Установлен дизельный двигатель
®mrn = 100 с-1 ®max = 500 с-1
Для карбюратора без ограничителя принимаем:
Ne max = 1,1 • Nev = 1,1 • 79,84 = 87,824 кВт
![]()
![]()
Построение тяговой характеристики:
Подбираем шину Кама EVRO 127, который имеет следующие показатели:
Размер — 175/70R13 Ширина профиля — 177 мм Наружный диаметр — 584 мм Статический радиус — 263 мм
Указанные размеры даны в миллиметрах, в соответствии с этим рассчитываем радиус качения колеса по следующей формуле:
rk = (D / 2 + х • В • Л) • 0,001мм где D — посадочный размер;
В — ширина профиля шины;
x — принимаем для грузовых автомобилей равным 1
Л — коэффициент деформаций шины под воздействием вертикальной нагрузки и крутящего момента. Принимаем для радиальных шин равным 0,92.
Определяем мощность на колесе по формуле:
р = М е • imp • Лтр / r k , кН где imp — передаточное число трансмиссии
i mp = i Kn • i 0 = 0,784 • 6,28 = 4,92
i0 — передаточное отношение главной передачи
где comax — максимальная угловая скорость вращения коленчатого вала;
КП^ — минимальное передаточное число коробки передач vmax — максимальная скорость, развиваемая на высшей передаче rk — радиус качения колеса
![]()
Динамическая характеристика автомобиля
Динамическим фактором по тяге называется отношение разности тяговой силы и силы сопротивления воздуха к весу подвижного состава:
где Pt — тяговая сила;
Pb — сила сопротивления воздуха;
G — вес автомобиля.
Динамической характеристикой подвижного состава называется зависимость динамического фактора по тяге от скорости на различных передачах.
Сила сопротивления воздуха:
Р ь = k • F • v2 (24)
где k — коэффициент сопротивления воздуха, Нс /м ;
F — площадь лобового сопротивления автомобиля, м 2 ; v — скорость движения автомобиля, км/ч.
Динамический фактор автомобиля соответствует дорожному сопротивлению, характеризуемому коэффициентом сопротивления дороги ¥, которое автомобиль способен преодолеть на данной передаче с заданной постоянной скоростью. В случае, если величина динамического фактора
автомобиля отличается от коэффициента сопротивления дороги, по которой
он движется, то это движение будет ускоренным (при D > ¥), либо
замедленным (при D j = — • (D — v м/с (25)
где g — ускорение свободного падения, м/с2;
° вр — коэффициент учета вращающихся масс автомобиля;
D — динамический фактор;
V — коэффициент сопротивления дороги.
О вр = 1 + а 1 • i + а 2 (26)
где а1 ,а2 — распределение нагрузки между передней и задней осью;
ik — передаточное отношение передачи.
Принимаем значения G по таблице 3.
Таблица 3- Зависимость G от типа автомобилей
![]()
Определение времени и пути разгона:
Время и путь разгона автомобиля до максимальной скорости являются самыми распространенными и наглядными характеристиками динамичности автомобиля. Их определение производят графоаналитическим способом с использованием графика ускорений автомобиля. При проведении расчетов полагаем, что разгон автомобиля на каждой передаче производится до достижения двигателем максимальных оборотов.
Кривые ускорений автомобиля, начиная с первой передачи, разбиваем на 6 интервалов скоростей (прилож. А). Для каждого интервала скоростей определяем среднее ускорение и изменение скорости в пределах интервала.
Предполагаем, что внутри интервала подвижной состав передвигается с постоянным средним ускорением, тогда время прохождения первого участка:
где t1 I — время прохождения первого участка, сек; v1 — скорость в конце участка, м/с; v! — скорость в начале участка, м/с; j1 — ускорение в начале участка, м/с 2 ;
jH — ускорение в конце участка, м/с 2 .
То же самое рассчитываем на остальных участках каждой передачи.
При переключении передачи происходит падение скорости, величина которой зависит от дорожных условии, скорости движения и параметров обтекаемости:
Av = 33 • tn • щ, м/с (28)
где ^ — время переключения передачи. Зависит от типа двигателя,
коробки передач и квалификации водителя.
Путь проходимый автомобилем за время переключения передачи:
AS l / = t П • V k (30)
Результаты вычислении заносим в таблицу 5.
![]()
Рисунок 6 — График пути
1.1.3. Тормозная динамичность
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки, т. е. за время ^ + tn + ?уст, где tc — время запаздывания тормозной системы; tn — время нарастания замедления; tyCT — интервал времени, в котором замедление постоянно.
В курсовой работе необходимо рассчитать минимально возможный тормозной путь (на горизонтальной дороге с асфальто- или цементобетонным покрытием, с полностью исправной тормозной системой, при 90%-ной глубине рисунка протектора шин), если начальная скорость автомобиля v0 составляет 60 км/ч.
Время tp — время реакции водителя — обычно находится в пределах 0,32,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.
Время tc (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2-0,3 с (гидравлический привод) до 0,6-0,8 с (пневматический привод). У автопоездов с пневматическим приводом тормозных механизмов оно может достигать 2-3 с. В течение времени (tp+ tc) автомобиль продолжает двигаться равномерно с начальной скоростью v0. В конце этого периода возникают тормозные силы, вызывающие замедление движения.
Продолжительность периода tn находим из выражения:
где b и Иц — расстояния соответственно от центра тяжести автомобиля до заднего моста и до поверхности дороги, м;
G — вес автомобиля, Н;
фх — коэффициент сцепления; для сухого асфальто- и цементобетонного покрытия он составляет 0,7-0,8;
L — база автомобиля;
К1 — скорость нарастания тормозных сил; для тормозных систем с гидроприводом она равна 15-30 кН/с, с пневмоприводом 25-100 кН/с.
14028,3 * 0,75 * (1,430 + 0,723 * 0,75) л
В заключительном периоде торможения, когда колеса обоих мостов заблокированы, установившееся замедление
где g — ускорение свободного падения.
J уст = 9,81 * 0,75 = 7,357 м/с;
Если известны tc, tK и _уусх, то тормозной путь можно рассчитать
следующим образом. Предположим, что в течение времени tn автомобиль
движется равнозамедленно с замедлением, равным 0,5/уст. При полном использовании сцепления всеми колесами автомобиля замедление определяют по формуле (6), тогда полный тормозной путь
мощность тормозных механизмов недостаточна для доведения передних колес до юза, то справедливы выражения (7), (8), однако время гя следует определять по формуле:
^ н = R x1max / K 1 ’
где Rximax — максимальная касательная реакция на колесах переднего моста, находится из справочных данных для конкретной модели автотранспортного средства.
Установившееся замедление в этом случае определяется не по формуле (6), а выражением:
где а — расстояние соответственно от центра тяжести автомобиля до переднего моста.
1.1.4. Устойчивость
Оценочными показателями устойчивости, определяемыми в данной курсовой работе, являются: скорость убук, максимально допустимая при прямолинейном движении автомобиля без пробуксовки ведущих колес;
максимально возможная (критическая) скорость уопр, с которой можно вести автомобиль без угрозы опрокидывания; максимально допустимый (критический) угол ропр косогора, по которому автомобиль может двигаться
без опрокидывания; максимальный угол подъема абук, при котором возможно равномерное движение автомобиля без буксования ведущих колес.
Скорость убук [м/с], максимально допустимая при прямолинейном движении автомобиля по горизонтальной дороге без пробуксовки ведущих колес, определяется на каждой передаче (с учетом найденного ранее по формуле (4) максимального ускорения jmax):
Скорость Убук уменьшается при уменьшении коэффициента сцепления, росте сопротивления дороги, а также при увеличении ускорения. Поэтому потеря курсовой устойчивости автомобилем наиболее вероятна на участках дороги со скользким неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник) и подъемами. Если при прохождении подъема «с ходу» встретится участок, покрытый снежной или ледяной коркой, то даже небольшая поперечная сила может вызвать боковое скольжение заднего моста.
Поперечную устойчивость при криволинейном движении характеризует максимально возможная (критическая) скорость Уопр, с которой можно вести автомобиль без угрозы опрокидывания по горизонтальному участку.
Рассмотрим схему движения автомобиля на повороте (рисунок 3). Примем для простоты, что автомобиль является плоской фигурой, а увод и скольжение колес отсутствуют. Мгновенный центр О скоростей (центр поворота) автомобиля располагается в точке пересечения перпендикуляров к векторам скоростей средних точек мостов. При отсутствии увода и скольжения колес вектор скорости середины заднего моста параллелен плоскостям задних колес, поэтому точка О находится на продолжении оси заднего моста.
![]()
Рисунок 3 — Схема поворота автомобиля.
Скорость Уопр определяем по формуле:
vonp =V BgR / ( 2h ,), (l 0 )
где 0 — угол поворота управляемых колес (в курсовой работе принимается менее 0,349 рад);
R — расстояние от точки О до середины заднего моста; при 0 6ук G( L — h^x) + G„p (L — 11Прф x)
где Gnp — вес прицепа, Н; Иир — высота сцепного устройства, м.
Чем меньше величина фх и чем больше масса прицепа по сравнению с массой тягача, тем меньше абук. Так, на дорогах с обледенелым покрытием буксование может наступить при абук = 2-3°, т. е. на относительно пологих подъемах.
Для одиночного автомобиля (типа 2х1) Gnp = 0:
t g а бук = 7″ ф ^ _ ’ (13)
бук 2,424 — 0,723*0,75
Для автомобиля со всеми ведущими мостами:
Такие автомобили могут преодолевать без потери продольной устойчивости весьма крутые подъемы даже при мокром и скользком покрытии.
1.1.5. Управляемость
Управляемостью называют способность автомобиля устойчиво сохранять заданное направление движения и вместе с тем быстро изменять его при воздействии водителя на рулевое управление.
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
При наличии увода автомобиль может двигаться криволинейно, даже если угол поворота управляемых колес равен 0. Кривизна траектории зависит от соотношения 51 и 52 (углы увода переднего и заднего мостов).
Если 51 = 52, то шинную поворачиваемость автомобиля называют нейтральной. Хотя при этом траектория движения автомобиля о жесткими шинами не совпадает о траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
Если 51 > 52, то для движения автомобиля с эластичными шинами по кривой управляемые колеса нужно повернуть на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют недостаточной. Автомобиль с недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное направление движения.
Если угол 51 2 / (2Sa)
где v — скорость автомобиля непосредственно перед ударом, м/с;
sa — остаточная деформация автомобиля, которая при ударе о поверхность,
сравнимую по площади с лобовой площадью автомобиля, составляет:
легковые автомобили с несущим кузовом. 0,40-0,90 м
легковые автомобили с рамным основанием. 0,20-0,40 м
грузовые автомобили и автобусы. 0,15-0,30 м
Jp = 16,66 2 /(2*0,4) * 35 g Jp = 16,66 2 /(2*0,9) * 16 g
Автомобиль, врезается в бетонную стенку на скорости 60 км/ч (16,66
Перегрузка, действующая на пассажиров, составит 35 g, то есть незафиксированного ремнем человека, весящего 75 кг, ударит о приборную доску с силой в 2624 кг.
1.3. Послеаварийная безопасность
Послеаварийная безопасность — это свойство автомобиля уменьшать тяжесть последствий ДТП после остановки и предотвращать возникновение новых ДТП. К элементам послеаварийной безопасности автомобиля относятся конструктивные мероприятия и дополнительные приборы, предотвращающие возникновение опасных явлений, возникающих в результате ДТП.
Опасными явлениями, которые могут возникнуть в результате ДТП, следует, считать пожар, заклинивание дверей, заполнение водой салона автомобиля, если он затонул.
Требования к пожарной безопасности автомобиля и соответствующим элементам его конструкции регламентируются Правилами № 34-01 ЕЭК ООН. Этот документ регламентирует утечку топлива из топливного бака, заливной горловины и топливопроводов при фронтальном наезде автомобиля на препятствие со скоростью 13,9 м/с или наезде сзади со скоростью 10 м/с; утечка топлива в момент наезда не должна превышать 28 г/мин, а образование каплеобразной смеси также 28 г/мин. В ходе испытаний определяется объем жидкости, заменяющей топливо и вытекшей из бака при нарушении его герметичности, оценивается вероятность возникновения пожара и возможность его тушения имеющимися на автомобиле средствами.
Конструкции автомобилей массового производства должны отвечать следующим требованиям в отношении пожарной безопасности:
1) Предусматривается установка огнестойкой перегородки между топливным баком и пассажирским салоном. Элементы системы питания должны быть защищены от коррозии и предохранены от соприкосновения с
препятствиями на грунте. Все топливопроводы должны располагаться в защищенных местах (но не в салоне автомобиля); они не должны подвергаться каким-либо механическим воздействиям. Топливный бак следует изготовлять из огнестойкого материала; он не должен заряжаться статическим электричеством.
2) Заливная горловина не должна располагаться в салоне, багажнике или моторном отсеке и выступать над поверхностью кузова; крышка горловины должна быть огнестойкой.
3) Электропроводку следует размещать в специальных каналах или крепить к корпусу; она должна быть защищена от коррозии.
4) Для предотвращения быстрого распространения пламени и образования в салоне ядовитых газов (продуктов сгорания) регламентируются свойства материалов для внутренней отделки салона.
Кроме того, для повышения пожарной безопасности автомобилей на них устанавливают автоматически включающиеся огнетушители (как правило, пенные); штатные пенные или порошковые огнетушители; устройства, автоматически размыкающие электроцепь автомобиля при возникновении перегрузок определенной величины; устройства для автоматического впрыскивания в топливный бак веществ, превращающих бензин в трудносгораемое вещество (композиции галогенов, кремниевые соединения, специальные смолы).
В отношении заклинивания дверей автомобилей можно применять Правила № 11-02 ЕЭК ООН «Прочность замков и петель боковых дверей”. Однако следует учитывать, что если применяются дополнительные устройства, повышающие надежность замка в исправном состоянии (блокираторы дверей), то открыть дверь в деформированном виде, скорее всего, будет труднее. В ходе испытаний автомобиля на удар проверяется, чтобы двери (по одной с каждой стороны) открывались без применения инструмента.
Облегчение эвакуации людей из салона автомобиля, особенно автобуса, может быть достигнуто следующими мероприятиями:
— устройством запасных выходных люков в крыше автобуса (автомобиля);
— устройством запасных выходных люков в боковых стенках автобуса;
— снабжением дверей и люков дополнительными наружными замками и
— оборудованием салона молотками для разбивания стекол, пилами,
молотами, ножницами и другими инструментами для прорезывания
отверстий в стенках автобуса.
Предотвращение попадания воды в салон автомобиля при его затоплении пока не регламентируется международными стандартами. В какой-то мере может быть применен Российский ОСТ 37.001.248 на пылеводонепроницаемость. Единственный путь борьбы с этим явлением -повышение общей герметичности салона автомобиля. В этом направлении имеется много нерешенных вопросов. Следует отметить, что возможность спасения людей из затопленного автомобиля зависит не столько от его
конструкции (водонепроницаемости), сколько от состояния окон автомобиля (открыты или закрыты), умения людей плавать, от присутствия духа у водителя и пассажиров.
1.4. Экологическая безопасность
Экологическая безопасность — это свойство автомобиля, позволяющее уменьшать вред, наносимый участникам движения и окружающей среде в процессе его нормальной эксплуатации. Мероприятиями по уменьшению вредного воздействия автомобилей на окружающую среду следует считать снижение токсичности отработавших газов и уровня шума.
Основными загрязняющими веществами при эксплуатации автотранспорта являются:
— нефтепродукты при их испарении;
— продукты истирания шин, тормозных колодок и дисков сцепления, асфальтовых и бетонных покрытий.
Наибольший загрязняющий эффект из всего перечисленного оказывают отработавшие газы. К основным вредным компонентам отработавших газов автомобилей относятся окись углерода СО (сильное токсичное вещество), углеводороды СНх, окислы азота NOx (токсичны, вместе с углеводородами СН образует фотохимический смог), альдегиды (вредно действуют на нервную систему и органы дыхания), твердые частицы (сажа), окислы серы БОх, бензапирен, соли свинца (сильно действующие токсичные вещества).
В настоящий момент в России действуют допустимые нормы по токсичности выхлопных газов Евро II (согласно Правилам №49, 83 ЕЭК ООН), введенные с 1 января 2001 г.
В Европе этот стандарт действует с 1996 г., а нормы Евро III вступают в силу с 1 октября 2001 года. Причем все они будут обязательны для российских
транспортных средств, работающих за границей. Кроме того, если российский автомобиль выпущен после октября 2001 года, то он должен удовлетворять нормам Евро III.
В Евро II регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составляет (в г/кВт*ч): СО (окись углерода) — 4,0; СН (углеводороды) — 1,1; КОх (оксиды азота) — 7,0; РМ (твердые частицы) — 0,15.
В Евро III требования к токсичности выхлопа ужесточаются -регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составит (в г/кВт*ч): СО (окись углерода) — 2,0; СН (углеводороды) — 0,6; КОх (оксиды азота) — 5,0; РМ (твердые частицы) — 0,1. Для бензиновых двигателей легковых автомобилей уровень выбросов в г/км: CO — 2,3; CH — 0,2; NOx — 0,15.
При движении автомобиля шум создается двигателем внутреннего сгорания, шасси автомобиля (в основном механизмами трансмиссии и кузовом) и в результате взаимодействия шин с дорожным покрытием.
У технически исправного легкового автомобиля, имеющего небольшой пробег, основной источник шума — взаимодействие шин с дорожным покрытием, у грузового автомобиля шум шин составляет меньшую долю. В результате взаимодействия колеса с дорожным покрытием возникает шум, уровень и характеристики которого зависят от типа автомобиля, конструкции подвески, рисунка протектора, нагрузки на шину, ее жесткости и давления в ней.
Шум от работы двигателя внутреннего сгорания возникает во впускном тракте карбюратора и трубопроводе; в газораспределительном клапанном механизме в результате взаимодействия толкателей с клапанами; в зубчатых, а также в цепных и ременных передачах между коленчатым и распределительным валами; в системе охлаждения двигателя вследствие работы вентилятора, ременной передачи и водяного насоса; в выпускной системе. Шум возникает также в зубчатых зацеплениях коробки передач и ряде других второстепенных (по шуму) механизмов.
В элементах шасси технически исправного (нового) автомобиля и его кузове шум создается при работе механизмов трансмиссии элементах подвески и в результате обтекания кузова воздушным потоком при движении.
Шум, создаваемый отдельным автомобилем (автопоездом), регламентируется рядом нормативных документов, основными из которых являются Правила № 9 ЕЭК ООН. Шум выпускаемых отечественной автомобильной промышленностью транспортных средств в основном соответствует этим нормам.
2. Подушка безопасности автомобиля ВАЗ
Подушка, безопасности — система пассивной безопасности (SRS, Supplementary Restraint System) в транспортных средствах.
Представляет собой эластичную оболочку, которая наполняется воздухом либо другим газом. Подушки безопасности широко используются для смягчения удара в случае автомобильного столкновения.
Пневмоподушка дополняет ремень безопасности, уменьшая шанс удара головы и верхней части тела пассажира о какую-либо часть салона автомобиля. Также они снижают опасность получения тяжелых травм, распределяя силу удара по телу пассажира.
«Недавно проведенное исследование показало, что более чем 6.000 жизней было спасено благодаря подушкам безопасности».
Стандартные плечевые ремни безопасности были фактически убраны в автомобилях выпуска 70-х, оснащенных подушками безопасности, которые были призваны заменить ремни при лобовых столкновениях. Подушка. безопасности на стороне пассажира была расположена в нижней части панели, что позволяло ей также защищать колени пассажира. Нижняя часть панели на водительском месте также отличалась своей выпуклостью.
Дженерал Моторз назвала свою систему ACRS (Air Cushion Restraint System). Она включает в себя боковую подушку безопасности для пассажира в автомобилях выпуска 70-х и предусматривает двухступенчатое развертывание как и более поздние системы.
Принцип действия основывается на использовании простого акселерометра, инициирующего химическую реакцию в специальном баллончике. В результате реакции происходит быстрое наполнение газом нейлоновой подушки, которая уменьшает перегрузку, испытываемую пассажиром в момент резкой остановки при столкновении. Подушка также имеет небольшие вентиляционные отверстия, которые используются для относительно медленного стравливания газа после удара пассажира об неё.
Фронтальные подушки безопасности не должны развертываться при боковом ударе, ударе в заднюю часть либо перевороте автомобиля. Из-за того, что подушки безопасности срабатывают лишь раз и затем быстро сдуваются, они бесполезны при последующем столкновении. Ремни безопасности помогают снизить риск получения тяжелых травм во многих случаях. Они способствуют правильному расположению пассажира в кресле для максимизации эффективности подушки безопасности, а также защищают пристегнутых пассажиров при первом и последующих столкновениях. Таким образом, жизненно необходимо пристегиваться, даже в машинах, оборудованных подушками безопасности.
Хотя в 60-х и 70-х годах они рекламировались как потенциальная замена ремней, в нынешнее время подушки безопасности продаются как дополнительное средство защиты. Максимально эффективно они работают вместе с ремнями безопасности. Автопроизводители пересмотрели свою точку зрения насчет замены подушками безопасности столь необходимых ремней.
Общая схема работы
Система подушек безопасности включает в себя три главных компонента:
-непосредственно сам модуль подушки безопасности
-датчики определения удара
Некоторые системы могут также иметь переключатель on/off (вкл/выкл) для отключения в случае надобности.
Модуль подушки безопасности содержит в себе блок наполнения и легкую нейлоновую подушку. Модуль водительской подушки безопасности
находится в центре рулевого колеса, а пассажира — в приборной панели. Полностью наполненная газом водительская подушка имеет примерно диаметр большого надувного пляжного мячаШаблон:НЕТ АИ. Пассажирская же может быть в два-три раза больше, так как дистанция между сидящим справа пассажиром и приборной панелью гораздо больше нежели расстояние между водителем и рулем.
Датчики удара расположены в передней части автомобиля и/или салоне. Автомобили могут быть оснащены одним и более датчиками, которые активируются под воздействием сил, возникающих при лобовом или близком к лобовому ударе. Датчики измеряют степень замедления, с которой машина сбрасывает скорость. Именно поэтому замедление автомобиля, при котором датчики активируют подушки, варьируется в зависимости от характера столкновения. Подушки безопасности не должны срабатывать при внезапном торможении или при езде по неровным поверхностям. На самом деле, максимальный уровень замедления при экстренном торможении составляет лишь незначительную часть от уровня, достаточного для приведения подушек безопасности в действие.
Блок диагностики следит за исправностью системы подушек безопасности. Он активируется при включении зажигания автомобиля. Если блок диагностики обнаружит неисправность, загорится лампочка, предупреждающая водителя о необходимости доставки автомобиля в авторизованный центр обслуживания для диагностики системы подушек безопасности. Большинство блоков диагностики имеют устройства, которые содержат достаточно электрической энергии для приведения подушек безопасности в действие, если основная аккумуляторная батарея будет быстро выведена из строя при столкновении.
Некоторые автомобили без задних сидений, такие как пикапы и кабриолеты, либо задние сидения которых слишком малы для установки детских сидений, имеют ручной переключатель on/off (вкл/выкл) для пассажира справа, установленный на заводе. Такие переключатели для водительской и пассажирской подушки безопасности могут быть установлены квалифицированным обслуживающим персоналом по запросу владельца транспортного средства, если он отвечает определенным государственным критериям и имеет разрешение.
Сперва большинство автомобилей комплектовалось лишь одной водительской подушкой безопасности (DAB), установленной в рулевом колесе и защищающей водителя (который имеет больше шансов получить травмы). На протяжении 90-х годов подушки для передних пассажиров (PAB), а затем раздельные боковые подушки (SAB), помещаемые между пассажирами и дверью, стали обычной практикой.
Подушка может серьезно ранить или даже убить непристегнутого ребенка, который сидит слишком близко к ней или же был выброшен вперед силой экстренного торможения. По мнению специалистов для безопасности ребенка необходимы следующие условия:
Дети должны перевозиться в правильно установленном и соответствующем возрасту автомобильном кресле на заднем сиденье. Внимательно изучите соответствующий раздел в инструкции к автомобилю.
Младенцы, перевозимые в кресле с задним расположением, (в возрасте до одного года и весом менее 10 кг) не должны находиться на переднем пассажирском сиденье при включенной подушке безопасности.
Если ребенок старше одного года вынужден ехать на переднем сиденье, оборудованном подушкой безопасности со стороны пассажира, то он или она должны сидеть в детском кресле ориентированном по направлению движения, или пристегнуты с использованием коленного или плечевого ремня, а сиденье должно быть отодвинуто назад насколько возможно.
Подушки безопасности для пешеходов
Разрабатываются опытные образцы подушек безопасности, расположенных снаружи автомобиля, перед ветровым стеклом.
Такие подушки раскрываются от сигнала сенсора переднего бампера и предотвращают удар головы пешехода о лобовое стекло (около 80 % смертей при столкновении).
Подушки безопасности для велосипедистов. Дизайнеры Анна Хаупт (Anna Haupt) и Тереза Алстин (Terese Alstin) из Швеции разработали прототип подушки безопасности для мотоциклистов и велосипедистов под названием Hovding, которая надувается в случае падения и предохраняет голову и шею от серьезных травм. Подушка. находится внутри водонепроницаемого тканевого чехла и в сложенном состоянии крепится вокруг шеи пилота. В момент падения подушка расскрывается за 0.1 секунду, обеспечивая защиту не хуже, чем обычный мотоциклетный шлем.
Заключение
Развитие современных видов транспорта позволяет обществу добиваться существенной экономии труда и времени, сокращать продолжительность процессов производства и обращения товаров, высвобождать время для общественно-полезной деятельности, образования и отдыха. Надземный, наземный, подземный и водный — это те виды транспорта, которые сейчас осуществляют перевозку грузов и пассажиров. Наиболее экономичным и перспективным является автомобильный транспорт, бурное развитие которого обусловлено большой подвижностью, высокой скоростью перевозки грузов, доставки грузов к адресату без промежуточных перегрузок и др.
Высокое качество современных автомобилей и автомобильных дорог, а также хорошая организация движения во многом облегчают труд водителя, уменьшают потенциальную возможность возникновения дорожнотранспортных происшествий (ДТП). Однако аварийность на автомобильных дорогах продолжает оставаться очень высокой и является подлинным бедствий во многих странах с развитым автомобильным движением. По данным Всемирной организации здравоохранения (ВОЗ) ежегодно в результате ДТП в мире погибают 1,3 млн. человек, 20-50 млн. получают травмы.
В России в практически каждый год от ДТП погибает свыше 35 тыс. человек, а увечья получают более 200 тыс. человек, причем 14 тыс. из них остались инвалидами навсегда.
Весь мир занят сейчас поисками мер борьбы с ДТП. Статистические данные последних десятилетий показывают, что в развитых странах смертность от ДТП ежегодно снижается, например в США за период с 1974 по 1998 год она уменьшилась на 27 %, а в странах с низким и среднем уровнем доходов, наоборот увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
Список использованных источников доступен в полной версии работы
Чертеж к курсовому проекту:
Скачать курсовую: У вас нет доступа к скачиванию файлов с нашего сервера. КАК ТУТ СКАЧИВАТЬ
Источник Источник http://revolution.allbest.ru/transport/00677096_0.html
Источник Источник Источник Источник http://privetstudent.com/kursovyye/kursovye-transport/1515-kursovaya-bezopasnost-transportnyh-sredstv.html